Gelöste Aufgaben/FEAE
Aufgabenstellung
Wir schauen uns die Lösungsanteile für die Bewegungsgleichung des Zwei-Masse-Schwinger an: welche Rolle spielen die homogene und partikulare Lösung?

Gesucht ist Gesamtlösung des Systems im Zeitbereich beim Loslassen der beiden Massen aus der Referenz-Konfiguration, bei der beide Federn entspannt sind. Wir stellen die Bewegungsgleichung mit dem Prinzip der virtuellen Verrückungen auf.
Wir arbeiten mit den System-Parametern
Lösung mit Maxima
Header
Der Lösungsweg zu dieser Aufgabe wird bereits in Integration der Differentialbeziehung (IVP) gezeigt, hier verfolgende wir einen etwas allgemeineren Lösungspfad.
Dabei arbeiten wir u.a. mit quadratischen Gleichungen. Für deren Lösung müssen wir Maxima wissen lassen, welche Parameter positiv sind, also
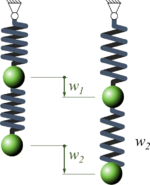
Koordinaten der Bewegung.

zusammen.
Für die dimensionslose Schreibweise brauchen wir später eine Bezugszeit tBez.
Dazu nehmen wir eine "Anleihe" bei einem ähnlichen System:
Für dieses System "kennen" wir die Eigenkreisfrequenz
- .
Aus diesem Modell "leihen" wir uns die Bezugszeit zu
- .
und wählen

Hier kennen wir ω0.

/*******************************************************/
/* MAXIMA script */
/* version: wxMaxima 16.04.2 */
/* author: Andreas Baumgart */
/* last updated: 2018-01-07 */
/* ref: FEM, PVMPE using two coordinates */
/* description: solve by principle virt. Work */
/*******************************************************/
/* declare variational variables - see 6.3 Identifiers */
declare("δW", alphabetic);
declare("δA", alphabetic);
declare("δΠ", alphabetic);
declare("δw", alphabetic);
declare("δQ", alphabetic);
/* assumptions */
assume(k[0]>0,m[0]>0,T>0);
/* abbreviations */
abbrev : [omega[0,0]=2*%pi/T, omega[0,0]^2= k[0]/m[0]];
abbrev : append(abbrev, solve(abbrev,[omega[0,0],T])[2]);
/* system parameters and dimensionless time tau */
params: [m[1]=m[0],m[2]=m[0],k[1]=3/2*k[0],k[2]=k[0],
t = T*tau, w[s] = m[0]*g/k[0]];
/* coordinates */
Q[t]: [ w[1](t), w[2](t)];
δQ[t]: [δw[1] ,δw[2] ];
Equilibrium Conditions
Die Gleichgewichtsbedingung mit dem Prinzip der virtuellen Verrückungen lautet
- .
Aufgelöst nach den Koeffizienten der virtuellen Verrückungen folgt die gewöhnliche, lineare Differentialgleichung:
- .
In dieser Beziehung stehen jetzt nur noch m0 und k0 - die Indizes "0" können wir also ab hier weglassen. In Matrix-Schreibweise lautet die Bewegungsgleichung jetzt:
- .
/* virtual of system (equilibrium condition) */
PvV : [δW = δW^a - δΠ,
δW^a = - sum(m[i]* diff(w[i](t),t,2)*δw[i],i,1,2) + sum(m[i]*g*δw[i],i,1,2),
δΠ = sum(k[i]*(w[i](t)-w[i-1](t))*(δw[i]-δw[i-1]),i,1,2)];
/* equlilbrium condition */
eom: subst(PvV[3],subst(PvV[2],subst(PvV[1],δW=0)));
eom: expand(subst([w[0](t)=0,δw[0]=0],eom));
M : -funmake('matrix,makelist(makelist(coeff(coeff(lhs(eom),δQ[t][i]),diff(Q[t][j],t,2)),i,1,2),j,1,2));
K : -funmake('matrix,makelist(makelist(coeff(coeff(lhs(eom),δQ[t][i]), Q[t][j] ),i,1,2),j,1,2));
G : funmake('matrix,makelist(coeff(
subst(makelist(diff(Q[t][i],t,2)=0,i,1,2),
subst(makelist( Q[t][i]=0 ,i,1,2),[lhs(eom)])),δQ[t][j]), j,1,2));
/* control print-out */
print(M,"∙",transpose(diff(Q[t],t,2)),"+",K,"∙",transpose(Q[t]),"=",G)$
Solving
Die Lösung des Anfangswertproblems setzt sich aus zwei Teilen zusammen:
- der partikularen Lösung, die die Rechte Seite "G" erfüllt und
- der homogenen Lösung, die die Rechte Seite "0" erfüllt.
Die Gesamtlösung Qt setzt sich nun - bei diesem linearen System - additiv aus partikularer Qp und Qh homogener Lösung zusammen:
/**************** total solution */
Q[t] : Q[p] + Q[h]
Right-Hand-Side Approach
Die rechte Seite der Bewegungsgleichung G ist nicht zeitabhängig - sie ist statisch. Also ist auch die Lösung Qp - die partikulare Lösung - statisch, wir suchen nach der Lösung des Gleichungssystems
und die ist
Wir führen die Abkürzung
ein, also ist
- .
/**************** particular solution */
Q[p] : ratsimp(subst(params,linsolve_by_lu(K,G)[1]));
Homogeneous Solution
Für die Lösung der homogenen Bewegungsgleichung
setzen wir (vgl. Modalanalyse) an
und erhalten das Eigenwertproblem
mit
| den Eigenwerten | und |
| den Eigenvektoren |
Die Berechnung der Eigenwerte λ wird einfacher mit
und wir transformieren parallel die Bewegungsgleichungen auf die dimensionslose Zeit
- mit ,
also
- .
Wir finden zwei Eigenwerte aus der Bedingung det(D)=0:
und
- .
Für die Matrix
stellen wir fest:
Die Matrix hat
- einen Rang (rank) von 1 - es gibt eine linear abhängige Zeile im Gleichungssystem und - entsprechend -
- einen Rangabfall (nullity) von 1.
Die Eigenvektoren spannen nun den Nullraum (nullspace) der Matrix auf. Normmert auf die Länge 1 sind das
- für λ1:
und - für λ2:
.
Die homogene Lösung der Bewegungsgleichung lautet damit
mit den Integrationskonstanten c1 und c2. Durch die komplexen Eigenwerte sind die beiden Integrationskonstanten nun auch komplexwertig, also
- .
Diese vier reell-wertigen Integrationskonstanten bekommen wir aus vier Anfangsbedingungen für die beiden Massen, hier
- .
Wir finden
- .
und damit
- .
/* direct approach */
load(eigen); eigensystem: uniteigenvectors(subst(params, invert(M).K));
/* -> not employed */
/**************** homogeneous solution */
/* solve eigenvalue problem */
Q[E] : matrix([q[1,i]],[q[2,i]]);
ansatz: Q[h] = Q[E]*%e^(%lambda[i]*tau);
D : -Lambda*(1/T)^2*M + K;
D : subst(params, D);
charPoly : determinant(D);
/* eigenvalues */
eigval : solve(subst(params,charPoly)=0,Lambda);
eigval : subst(abbrev, eigval);
/* save for later ....*/
eigvalList : makelist(subst(eigval[j],[%lambda[j]=%i*sqrt(Lambda)]),j,1,2);
/* eigenvectors */
prop: [rnk = rank(subst(eigval[1],subst(params,D))), nly = nullity(subst(eigval[1],D))];
eigvec : makelist(apply (addcol, args (nullspace(
subst(abbrev,subst(eigval[i],D/k[0]))))),i,1,2);
/* norm eigenvectors (to be of length "1" */
eigvec : makelist(eigvec[i]/sqrt(eigvec[i].eigvec[i]),i,1,2);
/* adapt to initial values w[1](0)=0, w[2](0)=0 */
Q[h] : sum(subst(eigval[j],subst([%lambda[j]=%i*sqrt(Lambda),i=j],
(c[R,j]+%i*c[I,j])*eigvec[j]*%e^(%lambda[j]*tau))),j,1,2);
/* update Q[t]*/
Q[t] : ''(Q[t]);
/* adapt to initial values */
intcons : [c[R,1],c[I,1],c[R,2],c[I,2]];
intcond : append(makelist(subst([tau=0], Q[t] )[i][1]=0,i,1,2),
makelist(subst([tau=0],diff(Q[t],tau))[i][1]=0,i,1,2));
/* integration constants: */
sol[1] : ratsimp(solve(realpart(intcond),intcons)[1]);
Q[t] : realpart(ratsimp(subst(params,subst(sol[1],Q[t]/w[s]))))
Post-Processing
Die Lösung für
- w1 (blau) und
- w2 (rot)
im Zeitbereich, angepasst an die Anfangsbedingungen, sieht nun so aus:

Interessant ist die separate Auftragung der Lösungsanteile nach partikularer Lösung (Index "p") und den beiden homogenen Lösungsanteilen (Index "h1", "h2"). Man erkennt, wie die Summe jeweils der blauen und der roten Anteile die Gesamtlösung ergibt.

/* plot results */
preamble: "set yrange [] reverse";
plot2d([Q[t][1][1],Q[t][2][1]],[tau,0,4], [legend, "w[1]", "w[2]"],
[xlabel, "τ/1 →"], [ylabel, "← w/(m*g/k)"],
[gnuplot_preamble, preamble]);
/* deconstruct solution into modes */
timeFcts : makelist(subst(eigvalList[i],%e^(%lambda[i]*tau)),i,1,2)
Q[l] : subst(params,append([Q[p]/w[s]],
realpart(makelist(coeff(subst(sol[1],Q[h]),timeFcts[i])/w[s]*timeFcts[i],i,1,2))));
plot2d([Q[l][1][1][1],Q[l][1][2][1],
Q[l][2][1][1],Q[l][2][2][1],
Q[l][3][1][1],Q[l][3][2][1]],
[tau,0,4],
[legend, "w[p,1]", "w[p,2]", "w[h1,1]", "w[h1,2]", "w[h2,1]", "w[h2,2]"],
[color, blue, red, blue, red, blue, red],
[style, [lines,3], [lines,3], [lines,1], [lines,1], [lines,1], [lines,1]],
[xlabel, "τ/1 →"], [ylabel, "← w/(m*g/k)"],
[gnuplot_preamble, preamble]);
Links
- ...
Literature
- ...