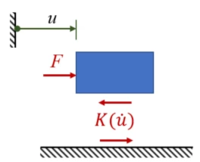
Reiben oder haften Körper aneinander, so wird ihre geschwindigkeitsabhängige Kontaktkraft K(v) in der Tangentialebene oft durch den Reib- und Haftbeiwert μ bzw. μ0 beschreiben:
mit
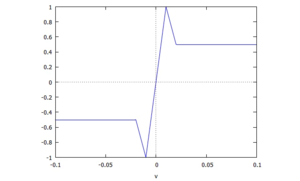
Erster Ansatz mit Geradenstücken
Kennlinie (erster Anlauf)
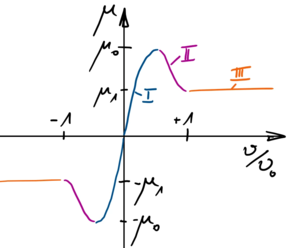
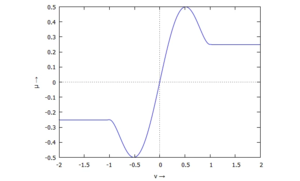
Statt zwischen Haften und Reiben zu unterscheiden, kann man mit folgender Kennlinie arbeiten, die Schaltstellen für v0 = +/- ε hat.
Die stückweise definierte Funktion ist:
Video laden
Lokale Datei sammelt möglicherweise persönliche Daten.
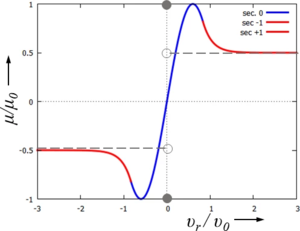
Erläuterungen zur Reibkennlinie
Maxima Code
Zum Einbauen in Ihr Programm: der Quellcode zur Kennlinie.
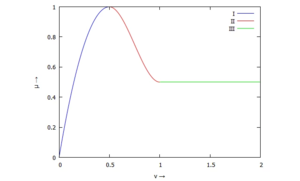
Reibkennline - aus Aufgabe Kw25Ein Ausschnitt der Kennlinie mit den Abschnitten I, II und IIIStetig differenzierbare Reibkennlinie mit angestückelten Polynomen.Stetig differenzierbare Reibkennlinie mit einem Polynom 5ter Ordnung
Cookies helfen uns bei der Bereitstellung von numpedia. Durch die Nutzung von numpedia erklärst du dich damit einverstanden, dass wir Cookies speichern.