Einheits-Quaternionen sind ein probates Werkzeug, um die räumliche Orientierung von Körpern zu beschreiben und räumliche Drehungen durchzuführen.
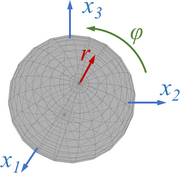
Dabei wird die Rotation durch einen Drehwinkel ϕ um eine Rotationsachse
beschreiben. Bei Einheits-Quaternionen gilt
Die Rotation wird dann durch das [Quadruple]
erfasst.
Die Transformationsmatrix können wir dann durch
abgebildet.