Einheits-Quaternionen sind ein probates Werkzeug, um die räumliche Orientierung von Körpern zu beschreiben und räumliche Drehungen durchzuführen.
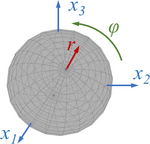
3D visualization einer Rotation bzgl. der Euler-Axe um den Winkel ϕ.
Dabei wird die Rotation durch einen Drehwinkel ϕ um eine Rotationsachse
beschreiben.
Bei Einheits-Quaternionen gilt
Cookies helfen uns bei der Bereitstellung von numpedia. Durch die Nutzung von numpedia erklärst du dich damit einverstanden, dass wir Cookies speichern.