Die Bewegung des Balkens wird durch das Zusammenspiel von elastischen Verformungen und Trägheitskräften bestimmt. Man nennt das "Schwingungen von Kontinua" - diese untersuchen wir hier. Der zentrale Aufgabe besteht in der Berechnung der homogenen Lösung - und der Anpassung der Lösungsanteile an die Anfangsbedingungen.
Lageplan
Gesucht ist analytische Lösung für Schwingungen des Euler-Bernoulli-Balkens beim Loslassen aus der enspannten Ruhelage.
Lösung mit Maxima
Header
Für die mathematische Behandlung - insbesondere der Auflösung quadratischer Gleichungen - setzen wir in Maxima voraus, dass
In der Gleichgewichtsbeziehung für den Euler-Bernoulli-Balken setzen wir als eingeprägte, äußere Streckenlast q(x,t) die D'Alembert'sche Trägheitskraft und die Gewichtskraft an, also
Die Lösung der linearen, partielle Bewegungsgleichung
setzt sich dann aus zwei Lösungsanteilen, der partikularen Lösung wp und der homogenen Lösung wh, zusammen; wir schreiben
Die komplexen Exponenten deuten schon darauf hin: im Allgemeinen sind die Koeffizienten Wi ebenfalls komplex. Für dieses Beispiel macht es deshalb viel Sinn, diese allgemeine Lösung der homogenen Differentialgleichung etwas anders hinzuschreiben. Wir nutzen dafür:
bei der wir davon ausgehen dürfen, dass alle Wi reellwertig sind.
Wie bei der partikularen Lösung wp sind es die vier Integrationskonstanten Wi, die wir nun an die Randbedingungen
anpassen müssen. Wir erhalten das lineare Gleichungssystem
,
vereinfacht und in Matrix-Schreibweise
.
Für dieses lineare, homogenen Gleichungen gibt es nur dann nicht-triviale Lösungen, wenn die Matrix einen Rangabfall >= 1 hat, also
.
Wir finden die charakteristische Gleichung
.
Beim Plotten der Funktion sehen wir bereits, dass es mehr als eine Nullstelle gibt, hier bei α≈+/- 2 und α≈+/- 5.
Charakteristische Gleichung
Die charakteristische Gleichung können wir umformen zu
und beide Anteile auftragen. So wird klar, dass die beiden Funktionen sich wegen der Periodizität der cos-Funktion unendlich oft schneiden - es also unendlich viele Nullstellen gibt:
Nullstellensuche (Ausschnitt)
Nullstellensuche
Analytisch finden wir keine Lösungen dieser charakteristischen Gleichung - wir müssen sie numerisch bestimmen – hier mit der Maxima-Funktion "find_root". Die ersten (positiven) Lösungen sind
.
Sie zu finden ist einfach, weil die αi für i>1 ungefähr π auseinander liegen - da können wir keine Nullstelle verpassen.
In diesen αi stecken über auch der Periodendauern, z.B. für die erste Mode
.
Wie bei einem normalen Eigenwertproblem berechnen wir nun die Eigenvektoren W aus der Beziehung
.
Aus unendlich vielen Lösungen αi folgen nun also auch unendlich viele Wj, die wir zu
bestimmen. Die homogene Lösung der Bewegungsgleichung ist also
.
Denken Sie daran: die Eigenkreisfrequenz ω0j ist dabei wieder eine Funktion von αi - siehe oben. Die Ci sind wieder Konstanten, die wir brauchen, um die Lösung an die Anfangsbedingungen anzupassen. Zunächst schauen wir uns die Lösung jeweils zu einem αi an. Diese Funktionen heißen Modalformen ϕ und deren Schwingungen können wir plotten:
Mode
Modalform ϕj
Mode
Modalform ϕj
#1
#2
#3
#4
#5
#6
Modalformen
Diese Moden ϕj können wir auch einzeln übereinander darstellen:
/***************************************************************************//*homogeneoussolution*//***************************************************************************/ansatz:w(x,t)=W[i]*%e^(kappa*x)*%e^(%i*omega[0]*t);heom:subst(ansatz,subst([g=0],eom));heom:ratsimp(subst(ansatz,ev(heom,nouns)/w(x,t)));sol[1]:subst(abbrev,solve(heom,kappa));/*ansatz:w(x,t)=sum(subst(sol[1][i],subst(ansatz,w(x,t))),i,1,length(sol[1])); *//*thisispossible-butresultsincomplexW[i]-toodemanding*/ansatz:w(x,t)=subst(sol[1][1],W[1]*%e^(kappa*x)*%e^(%i*omega[0]*t))+subst(sol[1][2],W[2]*%e^(kappa*x)*%e^(%i*omega[0]*t))+subst(sol[1][3],W[3]*%e^(kappa*x)*%e^(%i*omega[0]*t))+subst(sol[1][4],W[4]*%e^(kappa*x)*%e^(%i*omega[0]*t));/*..butwecanrephrasew(x,t)withhttps://de.wikipedia.org/wiki/Sinus_hyperbolicus_und_Kosinus_hyperbolicustohaveonlyreal-valuesW[i]:*/ansatz:w(x,t)=(W[1]*sinh(kappa*x)+W[2]*cosh(kappa*x)+W[3]*sin(kappa*x)+W[4]*cos(kappa*x))*%e^(%i*omega[0]*t);/*test:subst(ansatz,heom);ratsimp(ev(%,nouns));subst([x=xi*l[0]],%);subst(abbrev[1],%);*//*boundaryconditions*/BouCon:[subst([x=0],subst(ansatz,w(x,t)))/%e^(%i*omega[0]*t)=0,subst([x=0],diff(subst(ansatz,w(x,t)),x))/%e^(%i*omega[0]*t)=0,subst([x=l[0]],diff(subst(ansatz,w(x,t)),x,2))/%e^(%i*omega[0]*t)=0,subst([x=l[0]],diff(subst(ansatz,w(x,t)),x,3))/%e^(%i*omega[0]*t)=0];D:submatrix(augcoefmatrix(expand(BouCon),makelist(W[i],i,1,4)),5);/*whathappenstothesixalpha=0????*/D:diag_matrix(1,1/kappa,1/kappa^2,1/kappa^3).subst(abbrev,D);D:subst(solve(sol[1][4],kappa),D);CharEqua:expand(determinant(D))=0;CharEqua:ratsimp(subst([sin(alpha)^2=1-cos(alpha)^2,sinh(alpha)^2=cosh(alpha)^2-1],CharEqua/2));/*numericallyfindzerosforomega[0](alpha)*/plot2d(lhs(CharEqua),[alpha,-6,6],[y,-6,6],[ylabel,"lhs(CharEqua)→"],[xlabel,"α→"],[style,[lines,3]])$plot2d([cos(alpha),-1/cosh(alpha)],[alpha,0,60],[ylabel,"f(α)→"],[xlabel,"α→"],[style,[lines,3]])$guessed:[2,5,8,11,14,17];zeros:makelist(alpha=find_root(CharEqua/alpha^6,alpha,guessed[i]-1/2,guessed[i]+1/2),i,1,length(guessed));sol[2]:makelist(omega[0]=subst(zeros[i],subst(abbrev[3],sqrt(omega[0]))^2),i,1,length(zeros));params:append(params,[T[ref]=subst(zeros[1],subst(abbrev,2*%pi/omega[0]))]);/*useuppertriangularmatrixinsteadofD*/[P,L,U]:get_lu_factors(lu_factor(D))$/*geteigenvectors*/EigVec:subst(solve(makelist(sum(U[j][i]*W[i],i,1,4)=0,j,1,3),[W[1],W[2],W[3]])[1],matrix([W[1]],[W[2]],[W[3]],[W[4]]));EigVec:subst(abbrev,subst([W[4]=1],EigVec));Gammas:makelist(gamma=subst(zeros[i],subst(abbrev[2],gamma)),i,1,length(zeros));modeshape:subst(abbrev[2],subst([x=xi*l[0]],subst(sol[1][4],subst(makelist(W[i]=EigVec[i][1],i,1,4),subst(params,subst([t=T[ref]*tau],subst(abbrev,subst(ansatz,w(x,t)))))))));modes:makelist(subst(zeros[i],modeshape),i,1,length(zeros));/*plotmodesnapshotsforanimation->convertwithimageMagick*/fpprintprec:3$titles:makelist(simplode(["ω/ω1 = ",subst(sol[2][1],subst(sol[2][i],omega[0])/omega[0])]),i,1,6);NSteps:19$formode:1thru6doforj:0thruNStepsdo(tstep:simplode([ifj<10then"0"else"",j]),plot2d(subst([tau=j/(NSteps+1)],subst([tau=0],modes[mode])*sin(2*%pi*tau)),[xi,0,1],[title,titles[mode]],[legend,simplode(["t/T=",float(j/NSteps+0.01)])],[style,[lines,3,1]],[xlabel,"ξ →"],[ylabel,"← w "],[png_file,simplode([workdir,"mode-",mode,"-step-",tstep,".png"])],[gnuplot_preamble,"set yrange [2.1:-2.1] reverse"]))$/*plotallmodeshapes(1...6)*/legends:append([legend],makelist(simplode(["mode ",i]),i,1,length(zeros)));plot2d(subst([tau=0],modes),[xi,0,1],legends,[xlabel,"ξ →"],[ylabel,"← w "],[gnuplot_preamble,"set yrange [2.1:-2.1] reverse"])$
Adapt to Initial Condition
Zum Zeitpunkt t=0 soll
gelten. Das kriegen wir hin, indem wir die (unendlich vielen) Ci der homogenen Lösung passend wählend. Das klingt komplizierter als es ist - die Mathematik bereitet uns den Weg.
Die Beziehung oben multiplizieren wir dazu mit einer der Modalformen ϕk und bilden das Integral über die Balken-Lange ℓ, also
Wir projizieren also die Modalformen auf sich selbst und auf die partikulare Lösung. Und nutzen aus, dass diese Faltungs-Integrale der Modalformen eine besondere Eigenschaft haben:
Man sagt: die Funktionen sind zueinander verallgemeinert orthogonal. Damit berechnen wir
,
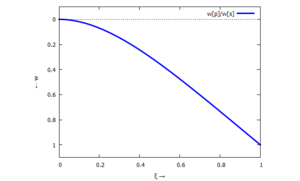
Nur die erste Modalform liefert einen signifikanten Beitrag bei der Anpassung an die Anfangsbedingungen, wir nehmen bei der Auftragung der Gesamtlösung wt(x,t) trotzdem die ersten sechs Modalformen mit:
Animation: Loslassen des Systems aus der unverformten Rugelage.
In der Animation sehen Sie das Loslassen des Stabes aus der unverformten, geraden Referenzlage für genau eine Periodenlänge T1 der ersten Modalform. Allerdings ist die Schwingung, die entsteht, nicht T1-periodisch - die anderen Modalformen leisten einen (kleinen) Beitrag, dessen Schwingungsperiode kein Vielfaches der Grundschwingung ist. Das sehen sie an dem kleinen "Ruck" in der Darstellung der Lösung, wenn nach der Dauer T1 der Grundschwingung wieder die Anfangslage eingeblendet wird.
Wieviele Moden man berücksichtigen muss, hängt von vielen praktischen Faktoren - z.B. der modalen Dämpfung - ab. Vergessen sollte man nicht, dass je nach Stab-Länge, der Einfluss der Schubverformung bei den höheren Moden zunimmt. Dann muss man ggf. das Modell wechseln ...
✔Saiteninstruente:
Bei Saiteninstrumenten möchte man Biegeschwingungen der Saiten verhindern. Darum sind besonders die Saiten, die eine hohe Massebelegung brauchen, um in niedrigen Frequenzen zu schwingen, besondere Konstruktionen. Dabei wird oft ein Draht um die eigentliche Saite gewickelt. Können Sie aus diesen Untersuchungen erkennen, was das Ziel dieser Konstruktion ist?
Cookies helfen uns bei der Bereitstellung von numpedia. Durch die Nutzung von numpedia erklärst du dich damit einverstanden, dass wir Cookies speichern.