Gelöste Aufgaben/Kw96
Aufgabenstellung
Ein Stab ABC ist durch eine lineare veränderliche Streckenlast q mit den Eckwerten qA in A und qB in B sowie dem Moment MB in B belastet. Der Stab (E-Modul: E) besteht aus zwei Sektionen mit den Längen l1 bzw. l2 sowie den Flächenmomenten I1 bzw. I2. Der Stab ist in A durch ein gelenkiges Festlager, in C durch eine Schiebehülse gelagert, in B sind die beiden Sektionen fest miteinander verbunden. Die Feder in A ist eine Drehfester mit Steifigkeit KA, die Federn in B und C sind Translationsfedern mit den Steifigkeiten kB, kC.

Gesucht ist die FEM Lösung für den Euler-Bernoulli-Balken unter Verwendung von zwei Finiten Elementen.

Ermitteln Sie für ein Euler-Bernoulli-Modell die analytischen Verläufe der Schnittgrößen und Verschiebungen im Balken für die angegebenen Parameter:
Die analytische Lösung finden Sie in Aufgabe Kw98.
Lösung mit Maxima
Header
Wir arbeiten mit den Standard-System-Matrizen nach Abschnitt "FEM-Formulierung für den Euler-Bernoulli-Balken".
/*******************************************************/
/* MAXIMA script */
/* version: wxMaxima 18.10.1 */
/* author: Andreas Baumgart */
/* last updated: 2019-02-10 */
/* ref: TM-C, Labor 4 */
/* description: finds the FE solution for */
/* lab problem #4 */
/*******************************************************/
Declarations
System-Parameter sind:
- .
/* declare variational variables - see 6.3 Identifiers */
declare("δA", alphabetic);
declare("δΠ", alphabetic);
declare("δW", alphabetic);
declare("δΦ", alphabetic);
declare("δw", alphabetic);
declare( "ℓ", alphabetic);
/* declarations */
assume(ℓ[i]>0);
/* system parameter */
units : [mm = m/1000, cm = m/100];
params : [q[A]=3*N/mm, ℓ[1]=700*mm, EI[1] = 2.1*10^11*N/m^2 * 3*cm*(4*cm)^3/12];
simple : [ℓ[2] = 3/4*ℓ[1], EI[2] = EI[1]/2,
K[A] = 2*EI[1]/ℓ[1], K[C] = 512/229*K[B]/2, K[B] = 2*EI[1]/ℓ[1]^3,
q[B] = 4*q[A], M[B] = q[A]*ℓ[1]^2];
params : append(params,makelist(
lhs(simple[i])=subst(params,rhs(simple[i])),i,1,length(simple)));
params : subst(units,params);
Formfunctions
Die Ansatzfunktion für die Trial-Functions ist ein Polynom 3. Grades:
An den Rändern müssen die Auslenkung und Kippung mit den Knoten-Variablen übereinstimmen:
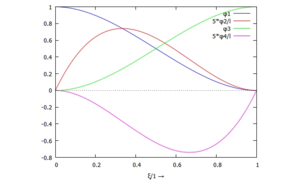
Trial-Functions

- .
/**** define form functions ***/
/* coordinates */
coords : [[ W[i-1], Φ[i-1], W[i], Φ[i]],
[δW[i-1],δΦ[i-1],δW[i],δΦ[i]]];
/* generic polynomials */
define(w(xi),sum(c[i]*xi^(i),i,0,3));
/* … and boundary conditions */
bc : [w(0) = W[i-1],
subst([xi=0],diff(w(xi),xi)/ℓ[i])=Φ[i-1],
w(1) = W[i],
subst([xi=1],diff(w(xi),xi)/ℓ[i])=Φ[i]];
/* solve for c's to comply with geometric boundary conditions */
coeffs : solve(bc, makelist(c[i],i,0,3))[1];
print("w(ξ) = ",facsum(expand(subst(coeffs,w(xi))),coords[1]));
trialfcts: makelist(phi[i]=coeff(expand(subst(coeffs,w(xi))),coords[1][i]),i,1,4);
plot2d(subst([ℓ[i]=5],subst(trialfcts,makelist(phi[i],i,1,4))),
[xi,0,1],[xlabel,"ξ/1 →"],
[legend,"φ1","5*φ2/ℓ","φ3","5*φ4/ℓ"]);
Equilibrium Conditions
So sind die Element-Steifigkeitsmatrix
die Koordinaten des FE-Modells - hier für das Element "1":
- .
Wir komponieren daraus die System-Steifigkeitsmatrix - durch Aufaddieren der Beiträge der beiden Elemente und Einarbeiten der Randbedingugnen - zu
Wie das geht, steht in Abschnitt Finite Elemente Methode.
/********************************************/
/* EUILIBRIUM CONDITIONS */
/* generic stiffness matrix */
K[i] : EI[i]/ℓ[i]^3*makelist(makelist(
integrate(
'diff(phi[i],xi,2)*'diff(phi[j],xi,2),
xi,0,1),
j,1,4),i,1,4);
K[i] : subst(trialfcts,K[i]);
K[i] : ev(K[i],nouns);
K[i] : funmake('matrix,K[i]);
/* compose system matrix */
NoN : 3; /* Number of Nodes*/
K[0] : zeromatrix(2*NoN,2*NoN);
for m:1 thru 4 do
for n:1 thru 4 do
(K[0][ m, n] : K[0][ m, n] + subst([i=1],K[i][m,n]),
K[0][2+m,2+n] : K[0][2+m,2+n] + subst([i=2],K[i][m,n]));
/* add springs */
K[0][2,2] : K[0][2,2] + K[A]; /* Φ[0] */
K[0][3,3] : K[0][3,3] + K[B]; /* W[1] */
K[0][5,5] : K[0][5,5] + K[C]; /* W[2] */
Q : matrix([W[0]],[Φ[0]],[W[1]],[Φ[1]],[W[2]],[Φ[2]]);
/* incorporate geometric boundary conditions */
/* eliminate rows / columns for W[0], Φ[2] (positions 1, 6) */
K[0] : submatrix(1,submatrix(6,K[0],6),1);
Q : submatrix(1,submatrix(6,Q));
/* compose righ-hand-side */
P : transpose(funmake('matrix,
[subst([i=1],append(makelist(integrate(
ℓ[i]*subst(trialfcts,(q[A]*(1-xi)+q[B]*xi)*phi[j]),
xi,0,1),j,1,4),[0,0]))]
));
P[4,1] : P[4,1]+M[B];
/* eliminate BCs */
P : submatrix(1,6,P);
print('K[i]," = ",EI[i]/ℓ[i]^3, ratsimp(K[i]/(EI[i]/ℓ[i]^3)))$
print('K[0]," = ", K[0])$
print("Q = ", Q)$
print("P = ", P)$
Solving
Die Knotenvariablen sind damit
- .
/********************************************/
/* SOLVE */
fpprintprec: 3;
sol[1] : linsolve_by_lu(subst(params,K[0]),subst(params,P))[1];
sol[1] : append([W[0]=0],makelist(Q[i][1] = sol[1][i][1],i,1,4), [Φ[2]=0]);
>
{{MyCodeBlock|title=Post-Processing |text=

Die Biegelinie des Balkens sieht damit so aus: