In Kugelkoordinaten oder räumlichen Polarkoordinaten wird ein Punkt ''P'' im dreidimensionalen Raum durch seinen Abstand vom Ursprung und zwei Winkel angegeben.
In Kugelkoordinaten oder räumlichen Polarkoordinaten wird ein Punkt ''P'' im dreidimensionalen Raum durch seinen Abstand vom Ursprung und zwei Winkel angegeben.
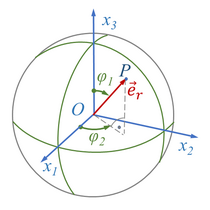
[[Datei:Kugelkoordinaten-01.png|210px|left|mini|Kugelkoordinaten r, φ<sub>1</sub>, φ<sub>2</sub> eines Punktes ''P'' und kartesisches Koordinatensystem mit den Achsen ''x<sub>1</sub>, x<sub>2</sub>,x<sub>3</sub>''.]]
[[Datei:Kugelkoordinaten-01.png|210px|left|mini|Kugelkoordinaten r, φ<sub>1</sub>, φ<sub>2</sub> eines Punktes ''P'' und kartesisches Koordinatensystem mit den Achsen ''x<sub>1</sub>, x<sub>2</sub>,x<sub>3</sub>''.]]
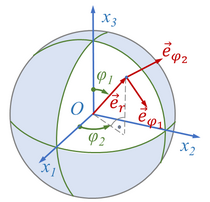
Die Kugelkoordinaten kann man - ähnlich wie bei den [[Sources/Lexikon/Eulersche_Winkel|Euler-Winkeln]] -zur Definition eines neuen, lokalen Koordinatensystems nutzen.
Die Kugelkoordinaten kann man - ähnlich wie bei den [[Sources/Lexikon/Eulersche_Winkel|Euler-Winkeln]] -zur Definition eines neuen, lokalen Koordinatensystems nutzen.
Neben dem Flächen-Normalenvektor <math>\vec{e}_r</math> spannen dabei die Tangentialvektoren <math>\vec{e}_{\varphi,1}, \vec{e}_{\varphi,2}</math> zu φ<sub>1</sub> und φ<sub>2</sub> eine neue Basis <math>\vec{\underline{e}}_K</math> auf.
Neben dem Flächen-Normalenvektor <math>\vec{e}_r</math> spannen dabei die Tangentialvektoren <math>\vec{e}_{\varphi,1}, \vec{e}_{\varphi,2}</math> zu φ<sub>1</sub> und φ<sub>2</sub> eine neue Basis <math>\vec{\underline{e}}_K</math> auf.
[[Datei:Kugelkoordinaten-02.png|210px|right|mini|Einheitsvektoren der Orthogonalbasis <math>\vec{\underline{e}}_K = \left[\vec{e}_r, \vec{e}_{\varphi,1}, \vec{e}_{\varphi,2}\right]</math>, die in Punkt ''P'' der Kugel mit <math>\vec{e}_r</math> die Flächennormale definieren und mit <math>\vec{e}_{\varphi,1}, \vec{e}_{\varphi,2}</math> die Tangentialebene aufspannen.]]
[[Datei:Kugelkoordinaten-02.png|210px|right|mini|Einheitsvektoren der Orthogonalbasis <math>\vec{\underline{e}}_K = \left[\vec{e}_r, \vec{e}_{\varphi,1}, \vec{e}_{\varphi,2}\right]</math>, die in Punkt ''P'' der Kugel mit <math>\vec{e}_r</math> die Flächennormale definieren und mit <math>\vec{e}_{\varphi,1}, \vec{e}_{\varphi,2}</math> die Tangentialebene aufspannen.]]
In Kugelkoordinaten oder räumlichen Polarkoordinaten wird ein Punkt P im dreidimensionalen Raum durch seinen Abstand vom Ursprung und zwei Winkel angegeben.
Kugelkoordinaten r, φ1, φ2 eines Punktes P und kartesisches Koordinatensystem mit den Achsen x1, x2,x3.
Die Kugelkoordinaten kann man - ähnlich wie bei den Euler-Winkeln -zur Definition eines neuen, lokalen Koordinatensystems nutzen.
Neben dem Flächen-Normalenvektor spannen dabei die Tangentialvektoren zu φ1 und φ2 eine neue Basis auf.
Einheitsvektoren der Orthogonalbasis , die in Punkt P der Kugel mit die Flächennormale definieren und mit die Tangentialebene aufspannen.
Cookies helfen uns bei der Bereitstellung von numpedia. Durch die Nutzung von numpedia erklärst du dich damit einverstanden, dass wir Cookies speichern.