Einheits-Quaternionen sind ein probates Werkzeug, um die räumliche Orientierung von Körpern zu beschreiben und räumliche Drehungen durchzuführen.
Einheits-Quaternionen sind ein probates Werkzeug, um die räumliche Orientierung von Körpern zu beschreiben und räumliche Drehungen durchzuführen.
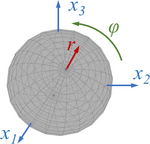
[[Datei:GYRQ-03.png|150px|3D visualization einer Rotation um die Euler-Axe <math>\displaystyle \vec {r}</math> um den Winkel ϕ.]]
[[Datei:GYRQ-03.png|150px|mini|3D visualization einer Rotation um die Euler-Axe <math>\displaystyle \vec {r}</math> um den Winkel ϕ.]]
Version vom 3. April 2022, 15:32 Uhr
Einheits-Quaternionen sind ein probates Werkzeug, um die räumliche Orientierung von Körpern zu beschreiben und räumliche Drehungen durchzuführen.
3D visualization einer Rotation um die Euler-Axe um den Winkel ϕ.
Cookies helfen uns bei der Bereitstellung von numpedia. Durch die Nutzung von numpedia erklärst du dich damit einverstanden, dass wir Cookies speichern.