Sources/Lexikon/Quaternionen für Drehungen: Unterschied zwischen den Versionen
Zur Navigation springen
Zur Suche springen
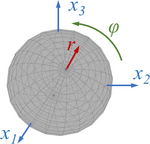
3D visualization einer Rotation um die Euler-Axe um den Winkel Fehler beim Parsen (Syntaxfehler): {\displaystyle ϕ}
.
Die Seite wurde neu angelegt: „Einheits-Quaternionen sind ein probates Werkzeug, um die räumliche Orientierung von Körpern zu beschreiben und räumliche Drehungen durchzuführen. Datei:G…“ |
Keine Bearbeitungszusammenfassung |
||
| Zeile 1: | Zeile 1: | ||
Einheits-Quaternionen sind ein probates Werkzeug, um die räumliche Orientierung von Körpern zu beschreiben und räumliche Drehungen durchzuführen. | Einheits-Quaternionen sind ein probates Werkzeug, um die räumliche Orientierung von Körpern zu beschreiben und räumliche Drehungen durchzuführen. | ||
[[Datei:GYRQ-03.png| | [[Datei:GYRQ-03.png|150px|right|3D visualization einer Rotation um die Euler-Axe <math>\displaystyle \vec {r}</math> um den Winkel <math>ϕ</math>.]] | ||
Version vom 3. April 2022, 15:30 Uhr
Einheits-Quaternionen sind ein probates Werkzeug, um die räumliche Orientierung von Körpern zu beschreiben und räumliche Drehungen durchzuführen.
