Die relevanten Größen wie ''die Stablänge ℓ<sub>i</sub>'', die Stablängung ''Δℓ<sub>i</sub>'' und die Stabkraft ''S''<sub>i</sub> sind im Stabsystem definiert, wir brauchen aber die Größen in einem einheitlichen ''x,y'' - Referenzsystem.
Die relevanten Größen wie ''die Stablänge ℓ<sub>i</sub>'', die Stablängung ''Δℓ<sub>i</sub>'' und die Stabkraft ''S''<sub>i</sub> sind im Stabsystem definiert, wir brauchen aber die Größen in einem einheitlichen ''x,y'' - Referenzsystem.
Zeile 23:
Zeile 20:
Damit wir also nicht bei jeder Aufgabe wieder von vorn anfangen, die ''Δℓ<sub>i</sub>'' als Funktion der Auslenkungen ''u<sub>j</sub>, v<sub>j</sub>'' der Knoten ''K,L'' im ''x,y'' - System herzuleiten, machen wir das ein Mal allgemein.
Damit wir also nicht bei jeder Aufgabe wieder von vorn anfangen, die ''Δℓ<sub>i</sub>'' als Funktion der Auslenkungen ''u<sub>j</sub>, v<sub>j</sub>'' der Knoten ''K,L'' im ''x,y'' - System herzuleiten, machen wir das ein Mal allgemein.
Dazu vergleichen wir den Stab in seiner verformten Konfiguration mit seiner Referenzkonfiguration - und schreiben die Terme der virtuellen Formänderungsenergie an.<!-------------------------------------------------------------------------------->
Dazu vergleichen wir den Stab in seiner verformten Konfiguration mit seiner Referenzkonfiguration - und schreiben die Terme der virtuellen Formänderungsenergie an.
Hier stehen die Deklarationen für spezielle Symbole zur Verwendung mit Maxima.<!-------------------------------------------------------------------------------->
{{MyCodeBlock|title=Declarations
{{MyCodeBlock|title=Declarations
|text=Text
|text=
Hier stehen nur die Deklarationen für spezielle Symbole zur Verwendung mit Maxima.
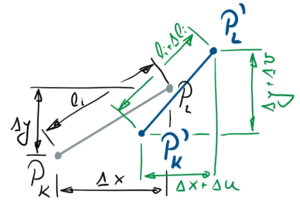
<math>\begin{array}{llc}P'_K: [x_k+u_k,& y_k+v_k],\\P'_L: [x_l+u_l,& y_l+v_l] \end{array}</math>''.''[[Datei:T312-12.png|mini|Kinematische Verträglichkeit]]Mit dem Satz von Pythagoras stellen wir nun den Zusammenhang her zwischen der Stablänge in der Ausgangskonfiguration und der verformten Konfiguration des Stabes:
::<math>\begin{array}{llc}P'_K: [x_k+u_k,& y_k+v_k],\\P'_L: [x_l+u_l,& y_l+v_l] \end{array}</math>''.''[[Datei:T312-12.png|mini|Kinematische Verträglichkeit]]Mit dem Satz von Pythagoras stellen wir nun den Zusammenhang her zwischen der Stablänge in der Ausgangskonfiguration und der verformten Konfiguration des Stabes:
Die zweite Zeile stellt den nichtlinearen Zusammenhang zwischen den Koordinaten der Knoten-Verschiebungen ''u<sub>j</sub>'',''v<sub>j</sub>'' und der Stablängung ''Δℓ<sub>i</sub>'' her.
Die zweite Zeile stellt den nichtlinearen Zusammenhang zwischen den Koordinaten der Knoten-Verschiebungen ''u<sub>j</sub>'',''v<sub>j</sub>'' und der Stablängung ''Δℓ<sub>i</sub>'' her.
Zeile 66:
Zeile 78:
Wir linearisieren deshalb den Ausdruck oben und erhalten
Wir linearisieren deshalb den Ausdruck oben und erhalten
Mit dem [[Werkzeuge/Gleichgewichtsbedingungen/Arbeitsprinzipe der Analytischen Mechanik/Prinzip der virtuellen Verrückungen|Prinzip der virtuellen Verrückungen]] schreiben wir die Gleichgewichtsbedingungen als
Mit dem [[Werkzeuge/Gleichgewichtsbedingungen/Arbeitsprinzipe der Analytischen Mechanik/Prinzip der virtuellen Verrückungen|Prinzip der virtuellen Verrückungen]] schreiben wir die Gleichgewichtsbedingungen als
<math>\delta W = \delta W^a - \delta \Pi</math>
::<math>\delta W = \delta W^a - \delta \Pi</math>
mit der virtuellen Formänderungsenergie ''δΠ'' aller Stäbe des Systems, also
mit der virtuellen Formänderungsenergie ''δΠ'' aller Stäbe des Systems, also
Stabwerkskräfte und deren Knoten-Verschiebungen können wir nun mit geringem Aufwand bearbeiten:
Stabwerkskräfte und deren Knoten-Verschiebungen können wir nun mit geringem Aufwand bearbeiten:
Zeile 136:
Zeile 177:
Das wäre zwar anschaulich richtig - aber unpraktisch. So würden wir große Ausdrücke erhalten für ''δΠ''. Einfacher und für die Behandlung mit dem Computer praktischer ist folgendes Vorgehen:
Das wäre zwar anschaulich richtig - aber unpraktisch. So würden wir große Ausdrücke erhalten für ''δΠ''. Einfacher und für die Behandlung mit dem Computer praktischer ist folgendes Vorgehen:
Ausgangspunkt ist
Ausgangspunkt ist die Element-Steifigkeitsmatrix
* die Element-Steifigkeitsmatrix
::<math>{\underline{\underline{K}}_{E}}</math>.
<math>{\underline{\underline{K}}_{E}}</math>
Wir erzeugen uns eine Steifigkeitsmatrix für die Verschiebungen aller Knoten des Stabwerks und sortieren die Elemente der Element-Steifigkeitsmatrix sukzessive und additiv in diese ein.
Wir erzeugen uns eine Steifigkeitsmatrix für die Verschiebungen aller Knoten des Stabwerks und sortieren die Elemente der Element-Steifigkeitsmatrix sukzessive und additiv in diese ein.
Wie das geht, zeigt [[Gelöste Aufgaben/T313|T313]].<!-------------------------------------------------------------------------------->
Wie das geht, zeigt [[Gelöste Aufgaben/T313|T313]].
Bei Arbeiten mit elastischen Stäben stoßen wir immer wieder auf die gleiche Aufgabe: das Aufstellen der virtuellen Formänderungsenergie eines Stabes, den wir in ein System einbauen müssen.
Lageplan - einzelner Stab
Gesucht ist die allgemeine Formulierung für die virtuelle Formänderungsenergie eines Stabes in einem Stabwerk.
Lösung mit Maxima
Die relevanten Größen wie die Stablänge ℓi, die Stablängung Δℓi und die Stabkraft Si sind im Stabsystem definiert, wir brauchen aber die Größen in einem einheitlichen x,y - Referenzsystem.
Damit wir also nicht bei jeder Aufgabe wieder von vorn anfangen, die Δℓi als Funktion der Auslenkungen uj, vj der Knoten K,L im x,y - System herzuleiten, machen wir das ein Mal allgemein.
Header
Dazu vergleichen wir den Stab in seiner verformten Konfiguration mit seiner Referenzkonfiguration - und schreiben die Terme der virtuellen Formänderungsenergie an.
Der Stab i hat die Knoten K und L, die im unverformten Stabwerk die Koordinaten
haben.
Im verformten System sind
.Kinematische VerträglichkeitMit dem Satz von Pythagoras stellen wir nun den Zusammenhang her zwischen der Stablänge in der Ausgangskonfiguration und der verformten Konfiguration des Stabes:
Die zweite Zeile stellt den nichtlinearen Zusammenhang zwischen den Koordinaten der Knoten-Verschiebungen uj,vj und der Stablängung Δℓi her.
Den nichtlinearen Zusammenhang brauchen wir praktisch nie, weil wir meist von kleinen Verformungen des Systems ausgehen - und damit auch kleinen Stablängungen ausgehen.
Wir linearisieren deshalb den Ausdruck oben und erhalten
Stabwerkskräfte und deren Knoten-Verschiebungen können wir nun mit geringem Aufwand bearbeiten:
Wir addieren die virtuelle Formänderungsenergie δΠi für jeden Stab zur gesamten virtuellen Formänderungsenergie δΠ zusammen.
Das wäre zwar anschaulich richtig - aber unpraktisch. So würden wir große Ausdrücke erhalten für δΠ. Einfacher und für die Behandlung mit dem Computer praktischer ist folgendes Vorgehen:
Ausgangspunkt ist die Element-Steifigkeitsmatrix
.
Wir erzeugen uns eine Steifigkeitsmatrix für die Verschiebungen aller Knoten des Stabwerks und sortieren die Elemente der Element-Steifigkeitsmatrix sukzessive und additiv in diese ein.
Cookies helfen uns bei der Bereitstellung von numpedia. Durch die Nutzung von numpedia erklärst du dich damit einverstanden, dass wir Cookies speichern.