Gelöste Aufgaben/Kw52: Unterschied zwischen den Versionen
Zur Navigation springen
Zur Suche springen
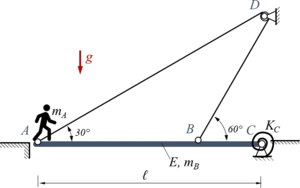
Lageplan (wie Kw50)
Keine Bearbeitungszusammenfassung |
Keine Bearbeitungszusammenfassung |
||
| Zeile 94: | Zeile 94: | ||
}} | }} | ||
<hr/> | <hr/> | ||
Version vom 31. März 2021, 05:35 Uhr
Aufgabenstellung
Eine Brücke ABC der Masse mB und homogener Biegesteifigkeit EI ist in C gelenkig gelagert und in A sowie B mit einem Seil verbunden. Das undehnbare Seil wird dabei über eine kleine Rolle (Radius r ≪ ℓ) in D haftungsfrei geführt. In Punkt C ist die Brücke über eine Drehfeder der Steifigkeit KC mit dem Lager verbunden. In A steht eine Person der Masse mA.

Geben Sie die Lösung für ein Euler-Bernoulli-Modell der Brücke mit dem Ansatz der Finiten Elemente an.
Dies ist eine Näherungslösung zu Kw50.
Ermitteln Sie die genäherten Verläufe der Schnittgrößen und Verschiebungen im Balken für diese Parameter:
tmp
Title
Text
1+1
tmp
Title
Text
1+1
tmp
Title
Text
1+1
tmp
Title
Text
1+1
tmp
Title
Text
1+1
tmp
Title
Text
1+1
tmp
Title
Text
1+1
Links
- Aufgabe Kw50 (analytische Lösung dieser Aufgabe)
- Aufgabe Kw52 (Lösung dieser Aufgabe mit dem Ansatz von Rayleigh-Ritz und Lagrange-Multiplikator)
- Aufgabe Kw53 (Lösung dieser Aufgabe mit dem Ansatz von Rayleigh-Ritz)
Literature
- ...