Wir stellen die Bewegungsgleichungen des Systems als System con Differentialgleichungen erster Ordnung auf. Die Nichtlinearität kommt aus der Reibkraft und dem "Abheben" der Kiste von der Feder.
Wir stellen die Bewegungsgleichungen des Systems als System con Differentialgleichungen erster Ordnung auf. Die Nichtlinearität kommt aus der Reibkraft und dem "Abheben" der Kiste von der Feder.
Zum Dimensionslos-Machen der Bewegungsgleichungen brauchen wir später eine Bezugslänge ℓ''<sub>B</sub>'' und eine Bezugszeit ''t<sub>B</sub>'', die wir mit Hilfe der Eigenfrequenz der zugeordneten linearen Systems so wählen:
Zum Dimensionslos-Machen der Bewegungsgleichungen brauchen wir später eine Bezugslänge ℓ''<sub>B</sub>'' und eine Bezugszeit ''t<sub>B</sub>'', die wir mit Hilfe der Eigenfrequenz der zugeordneten linearen Systems so wählen:
::(Achtung: das macht ''"1"''-periodische Lösungen)
(Achtung: das macht ''"1"''-periodische Lösungen)
Die Bezugslänge wählen wir zusätzlich so, dass
Die Bezugslänge wählen wir zusätzlich so, dass
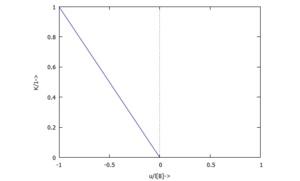
<math>\displaystyle g= 1 \cdot \frac{\ell_B}{t_B^2}</math>[[Datei:Kv53-11.png|mini|Kennlinie]]Nun müssen wir zwei [[Sources/Lexikon/Kennlinie|Kennlinien]] definieren: die [[Sources/Lexikon/Kontaktkennlinie|Kontakt-Kennlinie]] mit der Feder und die [[Sources/Lexikon/Reibkennlinie|Reib-Kennlinie]] zwischen Körper und Ebene.
::<math>\displaystyle g= 1 \cdot \frac{\ell_B}{t_B^2}</math>[[Datei:Kv53-11.png|mini|Kennlinie]]Nun müssen wir zwei [[Sources/Lexikon/Kennlinie|Kennlinien]] definieren: die [[Sources/Lexikon/Kontaktkennlinie|Kontakt-Kennlinie]] mit der Feder und die [[Sources/Lexikon/Reibkennlinie|Reib-Kennlinie]] zwischen Körper und Ebene.
Für den nichtlinearen Kontakt wählen wir
Für den nichtlinearen Kontakt wählen wir
<math>K(\Delta\ell) = \left\{\begin{array}{cl}0&\text{ für } \Delta\ell< 0\\\displaystyle k \cdot \Delta\ell&\text{ sonst }\end{array}\right.</math>
::<math>K(\Delta\ell) = \left\{\begin{array}{cl}0&\text{ für } \Delta\ell< 0\\\displaystyle k \cdot \Delta\ell&\text{ sonst }\end{array}\right.</math>
oder analog
oder analog
<math>K(\Delta\ell) = k \cdot \displaystyle \frac{1}{2} \left( |\Delta\ell|+ \Delta\ell \right)</math>.
::<math>K(\Delta\ell) = k \cdot \displaystyle \frac{1}{2} \left( |\Delta\ell|+ \Delta\ell \right)</math>.
Und für ''Δℓ'' =-u sieht sie dann so aus.
Und für ''Δℓ'' =-u sieht sie dann so aus.
Zeile 64:
Zeile 73:
[[Datei:Kv53.png|mini|Reib-Kennlinie]]Bei der Reib-Kennlinie geben wir uns mehr Mühe - sie sei ein punktsymmetrisches Polynom
[[Datei:Kv53.png|mini|Reib-Kennlinie]]Bei der Reib-Kennlinie geben wir uns mehr Mühe - sie sei ein punktsymmetrisches Polynom
<math>\mu(v) = \mu_1 \cdot \left\{\begin{array}{cl}-1&\text{ wenn } v< -v_0 \text{ , }\\\displaystyle \sum_1^4 a_{2 i-1}\cdot v^{2 i-1}&\text{ wenn } -v_0<v< v_0 \text{ und }\\+1&\text{ sonst }\end{array}\right.</math>
::<math>\mu(v) = \mu_1 \cdot \left\{\begin{array}{cl}-1&\text{ wenn } v< -v_0 \text{ , }\\\displaystyle \sum_1^4 a_{2 i-1}\cdot v^{2 i-1}&\text{ wenn } -v_0<v< v_0 \text{ und }\\+1&\text{ sonst }\end{array}\right.</math>
erhalten wir aus einer Lösungsroutine nach dem [[Anfangswertprobleme/Methoden zur Lösung von Anfangswertproblemen/Runge-Kutta-Verfahren 4.ter Ordnung|Runge-Kutta-Verfahren 4.ter Ordnung]] das numerische Ergebnis.
erhalten wir aus einer Lösungsroutine nach dem [[Anfangswertprobleme/Methoden zur Lösung von Anfangswertproblemen/Runge-Kutta-Verfahren 4.ter Ordnung|Runge-Kutta-Verfahren 4.ter Ordnung]] das numerische Ergebnis.
Eine Kiste der Masse m bewegt sich auf einer schiefen Ebene, die unter dem Winkel α gegenüber der Horizontalen geneigt ist. Zwischen Kiste und Ebene wirkt eine Reibkraft (Haft-Koeffizient μ0, Reib-Koeffizient μ1). Zu Beginn der Bewegung wird die Kiste wie skizziert um den Betrag Δℓ in eine Feder der Steifigkeit k eingedrückt und dann losgelassen.
Lageplan
Gesucht ist die nichtlineare Bewegungsgleichung mit Reibkennlinie sowie die numerische Lösung als Anfangswertproblem.
Dabei sollen verschiedene Ergebnis-Muster gezeigt werden:
die Kiste bleibt nach der ersten Aufwärts-Bewegung auf der Ebene bei B haften und bewegt sich nicht weiter.
die Kiste erfährt mehrere Aufwärts- und Abwärts-Bewegungen, bevor sie liegen bleibt.
Lösung mit Maxima
Lorem Ipsum ....
Header
Wir stellen die Bewegungsgleichungen des Systems als System con Differentialgleichungen erster Ordnung auf. Die Nichtlinearität kommt aus der Reibkraft und dem "Abheben" der Kiste von der Feder.
Zum Dimensionslos-Machen der Bewegungsgleichungen brauchen wir später eine Bezugslänge ℓB und eine Bezugszeit tB, die wir mit Hilfe der Eigenfrequenz der zugeordneten linearen Systems so wählen:
Aus numerischer Sicht ist diese Kennlinie "Pfusch" - sie ist nicht stetig differenzierbar. Wenn wir also auf Probleme bei der Lösung stoßen - hier loht es sich, wieder einzusteigen .
Reib-Kennlinie
Bei der Reib-Kennlinie geben wir uns mehr Mühe - sie sei ein punktsymmetrisches Polynom
Im Phasenraum können wir beide Lösungen übereinander plotten:
Phasendiagramm (beide Lösungen)
Und wir können uns die Reibkraft anschauen - mit den Spitzen, zu denen Haften auftritt:
Reibkoeffizient μ
Machen wir den WInkel der Ebene etwas flacher - hier α = 4° - so bleibt die Kiste im Umkehrpunkt liegen. Man sieht: sie haftet nicht wirklich, sondern rutscht nur sehr langsam die Ebene herunter.
Damit wir den Effekt des "Haftens" genauer abbilden, können wir das ε noch kleiner machen.
Cookies helfen uns bei der Bereitstellung von numpedia. Durch die Nutzung von numpedia erklärst du dich damit einverstanden, dass wir Cookies speichern.