Die Bezugsgrößen dürfen wir frei wählen - aber wie? Für ℓ''<sub>Bez</sub> = h'' drücken wir die Auslenkung ''w'' als Vielfaches von ''h'' aus - das ist praktisch! Denn damit die Annahmen zur Linearisierung beim Euler-Bernoulli-Balken eingehalten werden, sollte ''w ≤ h'', also
Die Bezugsgrößen dürfen wir frei wählen - aber wie? Für ℓ''<sub>Bez</sub> = h'' drücken wir die Auslenkung ''w'' als Vielfaches von ''h'' aus - das ist praktisch! Denn damit die Annahmen zur Linearisierung beim Euler-Bernoulli-Balken eingehalten werden, sollte ''w ≤ h'', also
<math>\tilde{w} \le 1</math>
::<math>\tilde{w} \le 1</math>
Für die Bezugskaft bietet sich ''F<sub>Bez</sub> = G'' an, wobei ''G'' die Gewichtskraft des Balkens ist. Dann ist <math>\tilde{q}</math> das Vielfache der Gewichts-Streckenlast.
Für die Bezugskaft bietet sich ''F<sub>Bez</sub> = G'' an, wobei ''G'' die Gewichtskraft des Balkens ist. Dann ist <math>\tilde{q}</math> das Vielfache der Gewichts-Streckenlast.
Zeile 37:
Zeile 35:
Umschreiben und Auflösen liefert mit I = h<sup>4</sup>/12
Umschreiben und Auflösen liefert mit I = h<sup>4</sup>/12
Die dimensionslose Ortskoordinate brauchen wir für den Rest der Aufgaben - man wählt deshalb oft
Die dimensionslose Ortskoordinate brauchen wir für den Rest der Aufgaben - man wählt deshalb oft
<math>\displaystyle \xi := \tilde{x} \text{ und } \frac{d}{d\xi}(.) =: (.)'</math>
::<math>\displaystyle \xi := \tilde{x} \text{ und } \frac{d}{d\xi}(.) =: (.)'</math>
und erhält als neue Bewegungsgleichung
und erhält als neue Bewegungsgleichung
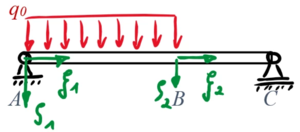
<math>\tilde{w}'''' = \mu</math>.[[Datei:Kit4-11.png|mini|Koordinaten]]Mit den neuen dimensionslosen Koordinaten und Parametern vereinfacht sich die Lösung des Problems:
::<math>\tilde{w}'''' = \mu</math>.[[Datei:Kit4-11.png|mini|Koordinaten]]Mit den neuen dimensionslosen Koordinaten und Parametern vereinfacht sich die Lösung des Problems:
So ist die analytische Lösung der Bewegungsgleichung für den Bereich ''i'':
So ist die analytische Lösung der Bewegungsgleichung für den Bereich ''i'':
Die Bezugsgrößen dürfen wir frei wählen - aber wie? Für ℓBez = h drücken wir die Auslenkung w als Vielfaches von h aus - das ist praktisch! Denn damit die Annahmen zur Linearisierung beim Euler-Bernoulli-Balken eingehalten werden, sollte w ≤ h, also
Für die Bezugskaft bietet sich FBez = G an, wobei G die Gewichtskraft des Balkens ist. Dann ist das Vielfache der Gewichts-Streckenlast.
Umschreiben und Auflösen liefert mit I = h4/12
oder abgekürzt:
Die dimensionslose Ortskoordinate brauchen wir für den Rest der Aufgaben - man wählt deshalb oft
und erhält als neue Bewegungsgleichung
.KoordinatenMit den neuen dimensionslosen Koordinaten und Parametern vereinfacht sich die Lösung des Problems:
So ist die analytische Lösung der Bewegungsgleichung für den Bereich i:
wobei der Bereich i=1 zwischen A-B sowie i=2 zwischen B-C liegt.
Die Rand- und Übergangsbedingungen lauten dann mit ℓ2 = ℓ1/2
Cookies helfen uns bei der Bereitstellung von numpedia. Durch die Nutzung von numpedia erklärst du dich damit einverstanden, dass wir Cookies speichern.