Gelöste Aufgaben/T3BP: Unterschied zwischen den Versionen
Zur Navigation springen
Zur Suche springen
"Die Drei Sonnen"
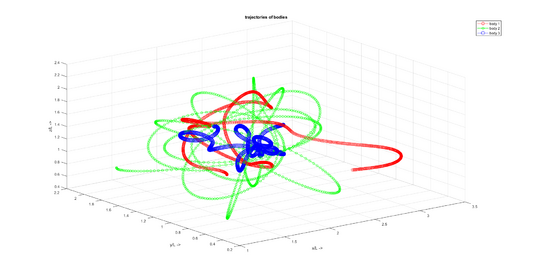
"Trajektoren der Körper" 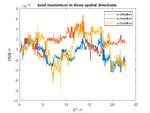
"Bewegungsgrößen Σ Mi Ii,x" "Animation der Bewegung"
Keine Bearbeitungszusammenfassung |
Keine Bearbeitungszusammenfassung |
||
| Zeile 36: | Zeile 36: | ||
<!-------------------------------------------------------------------------------->{{MyCodeBlock|title=Equilibrium Conditions | <!-------------------------------------------------------------------------------->{{MyCodeBlock|title=Equilibrium Conditions | ||
|text=Text | |text=Text | ||
::<math> M_i \dot \ddot{\vec{u}}_i = \sum_{\ell=j,k} G\cdot \frac{\displaystyle M_i\cdot M_\ell}{\displaystyle r_{i,\ell}^2} \dot \vec{e}_{i,\ell}<math> | |||
|code= | |code= | ||
<syntaxhighlight lang="lisp" line start=1> | <syntaxhighlight lang="lisp" line start=1> | ||
| Zeile 53: | Zeile 56: | ||
|text=Text | |text=Text | ||
[[Datei:T3BP-21.png| | [[Datei:T3BP-21.png|550px|left|mini|"Trajektoren der Körper"]] | ||
[[Datei:T3BP-22.png|150px|left|mini|"Bewegungsgrößen <i>Σ M<sub>i</sub> <i>I<sub>i,x</sub>"</i>]] | [[Datei:T3BP-22.png|150px|left|mini|"Bewegungsgrößen <i>Σ M<sub>i</sub> <i>I<sub>i,x</sub>"</i>]] | ||
[[Datei:T3BP-23.mp4|100%|left|mini|"Animation der Bewegung"]] | [[Datei:T3BP-23.mp4|100%|left|mini|"Animation der Bewegung"]] | ||
|code= | |code= | ||
Version vom 2. Oktober 2022, 18:54 Uhr
Aufgabenstellung
Sie untersuchen das „Three-Body-Problem“(vgl. Wikipedia) numerisch. Dabei sollen die Bahnen von drei Körper mit den Punktmassen M1, M22, M3 in Wechselwirkung miteinander berechnet werden.

Gesucht ist die Lösung des Anfangswertproblems für verschiedene Anfangswerte (Orte und Geschwindigkeiten) und Massen Mi der Körper.
Lösung mit Matlab®
Lorem Ipsum ....
tmp
Header
Text
1+1
Declarations
Text
1+1
Equilibrium Conditions
Text
- <math> M_i \dot \ddot{\vec{u
{{{code}}}
_i = \sum_{\ell=j,k} G\cdot \frac{\displaystyle M_i\cdot M_\ell}{\displaystyle r_{i,\ell}^2} \dot \vec{e}_{i,\ell}<math>
|code=
1+1
}}
Solving
Text
1+1
Post-Processing
Text


1+1
Links
- ...
Literature
- ...