Sources/Lexikon/Quaternionen für Drehungen: Unterschied zwischen den Versionen
Zur Navigation springen
Zur Suche springen
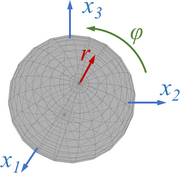
3D visualization einer Rotation bzgl. der Euler-Axe um den Winkel ϕ.
Keine Bearbeitungszusammenfassung |
Keine Bearbeitungszusammenfassung |
||
| Zeile 6: | Zeile 6: | ||
Bei Einheits-Quaternionen gilt | Bei Einheits-Quaternionen gilt | ||
::<math>\displaystyle \sqrt{r_x^2 + r_y^2 + r_z^2} = 1</math>. | ::<math>\displaystyle \sqrt{r_x^2 + r_y^2 + r_z^2} = 1</math>. | ||
Die Rotation wird dann durch das | Die Rotation wird dann durch das [https://en.wikipedia.org/wiki/Tuple Quadruple] | ||
::<math>\displaystyle \underline{q} = \left[\cos\varphi, r_x\cdot\sin\varphi, r_y\cdot\sin\varphi, r_z\cdot\sin\varphi \right]</math> | ::<math>\displaystyle \underline{q} = \left[\cos\varphi, r_x\cdot\sin\varphi, r_y\cdot\sin\varphi, r_z\cdot\sin\varphi \right]</math> | ||
erfasst. | erfasst. | ||
Version vom 4. April 2022, 15:01 Uhr
Einheits-Quaternionen sind ein probates Werkzeug, um die räumliche Orientierung von Körpern zu beschreiben und räumliche Drehungen durchzuführen.

Dabei wird die Rotation durch einen Drehwinkel ϕ um eine Rotationsachse
beschreiben. Bei Einheits-Quaternionen gilt
- .
Die Rotation wird dann durch das Quadruple
erfasst.
Die Transformationsmatrix können wir dann durch
abgebildet. Als unabhängige Koordinaten eignen sich die allerdings nicht: die Bedingung, dass die Euler-Achse ein Einheitsvektor sein muss, lässt sich nur sehr schwer in die Lösung eines Anfangswertproblemes einbauen.