Die Aufgabe ist ein klassisches Randwertproblem mit
Die Aufgabe ist ein klassisches Randwertproblem mit
# zwei Gebieten, in denen ein Euler-Bernoulli-Balken in AB und BC durch eine Streckenlast ''q<sub>0</sub>'' belastet ist und somit durch die Differentialbeziehung
<li>zwei Gebieten, in denen ein Euler-Bernoulli-Balken in AB und BC durch eine Streckenlast ''q<sub>0</sub>'' belastet ist und somit durch die Differentialbeziehung
# Rand- und Übergangsbedingungen in den Punkten A, B, C.
<li>Rand- und Übergangsbedingungen in den Punkten A, B, C.</li>
</ol>
Die Biegesteifigkeit des Balkens ist konstant (nicht von "''x"'' abhängig), wir können als den Index "''i''" beim Flächenmoment also weglassen.
Die Biegesteifigkeit des Balkens ist konstant (nicht von "''x"'' abhängig), wir können als den Index "''i''" beim Flächenmoment also weglassen.
Zeile 40:
Zeile 42:
Wie? Das machen wir uns an einem Bild klar:[[Datei:Kw50-12.png|mini|Geometrische Zwangsbedingung|alternativtext=|200x200px]]In linearer Näherung ist der Zusammenhang zwischen der Seil-Abwicklung ''Δs<sub>A</sub>'' und der vertial-Verschibung ''W<sub>A</sub>'' in Punkt ''A''
Wie? Das machen wir uns an einem Bild klar:[[Datei:Kw50-12.png|mini|Geometrische Zwangsbedingung|alternativtext=|200x200px]]In linearer Näherung ist der Zusammenhang zwischen der Seil-Abwicklung ''Δs<sub>A</sub>'' und der vertial-Verschibung ''W<sub>A</sub>'' in Punkt ''A''
Die Streckenlast auf den Balken ist natürlich seine Gewichtskraft, also
Die Streckenlast auf den Balken ist natürlich seine Gewichtskraft, also
<math>\displaystyle q_0 = \frac{m_B\;g}{\ell_0}</math>.[[Datei:Kw50-06.png|mini|Geometrie]]Geometrische Zusammenhänge müssen wir auch anschreiben, so für
::<math>\displaystyle q_0 = \frac{m_B\;g}{\ell_0}</math>.[[Datei:Kw50-06.png|mini|Geometrie]]Geometrische Zusammenhänge müssen wir auch anschreiben, so für
aus der tabellierten Lösung für einen Kragbalken der Länge ''ℓ'' und einer Endlast ''m<sub>B</sub> g.'' Das erscheint nicht sonderlich schlau - es gibt Standard -Lastfälle die besser passen würden. Aber dann schleppen wir die ganze Zeit Koeffizienten wie z.B. ''5/384'' mit durch die Rechnungen - das macht die Arbeit unübersichtlich.<!-------------------------------------------------------------------------------->
aus der [[Sources/Lexikon/Standard-Lösungen|tabellierten Lösung]] für einen Kragbalken der Länge ''ℓ'' und einer Endlast ''m<sub>B</sub> g.'' Das erscheint nicht sonderlich schlau - es gibt Standard -Lastfälle die besser passen würden. Aber dann schleppen wir die ganze Zeit Koeffizienten wie z.B. ''5/384'' mit durch die Rechnungen - das macht die Arbeit unübersichtlich.
{{MyCodeBlock|title=Declarations
|text=Text
|code=
|code=
<syntaxhighlight lang="lisp" line start=1>
<syntaxhighlight lang="lisp" line start=1>
1+1
/* declare variational variables - see 6.3 Identifiers */
die wir durch Integration lösen und dann bereichsweise an Rand- und Übergangsbedingungen anpassen. Diese Aufgabe wird etwas übersichtlicher, wenn wir die Auslenkung ''w'' und die Ortskoordinate ''x'' dimensionslos machen. So wählen wir:
die wir durch Integration lösen und dann bereichsweise an Rand- und Übergangsbedingungen anpassen. Diese Aufgabe wird etwas übersichtlicher, wenn wir die Auslenkung ''w'' und die Ortskoordinate ''x'' dimensionslos machen. So wählen wir:
<math>w = \ell_{Bez}\cdot \tilde{w}</math>
::<math>w = \ell_{Bez}\cdot \tilde{w}</math>
und setzten für die Bezugslänge die Auslenkung eines Kragbalkens unter konstanter Streckenlast (hier ''q<sub>A</sub>'') an.
und setzten für die Bezugslänge die Auslenkung eines Kragbalkens unter konstanter Streckenlast (hier ''q<sub>A</sub>'') an.
Zeile 102:
Zeile 135:
Zusätzlich wählen wir eine unabhängige, dimensionslose Ortskoordinaten für die Bereich I und II, die ihren Ursprung in den Punkt A hat:
Zusätzlich wählen wir eine unabhängige, dimensionslose Ortskoordinaten für die Bereich I und II, die ihren Ursprung in den Punkt A hat:
<math>\xi = \displaystyle \frac{x}{\ell}</math>
::<math>\xi = \displaystyle \frac{x}{\ell}</math>
Mit den weiteren Gleichungen für
Mit den weiteren Gleichungen für
<math>\begin{array}{ll} \ldots\text{ die Verdrehung: }&\displaystyle \phi_i(x) = \frac{d\,w_i(x)}{d\,x}\\ \ldots\text{ das Biege-Moment: }&\displaystyle M_i(x) = - E I \frac{d^2\,w_i(x)}{d\,x^2}\\ \ldots\text{ die Querkraft: }&\displaystyle Q_i(x) = - EI \frac{d^3\,w_i(x)}{d\,x^3} \end{array}</math>
::<math>\begin{array}{ll} \ldots\text{ die Verdrehung: }&\displaystyle \phi_i(x) = \frac{d\,w_i(x)}{d\,x}\\ \ldots\text{ das Biege-Moment: }&\displaystyle M_i(x) = - E I \frac{d^2\,w_i(x)}{d\,x^2}\\ \ldots\text{ die Querkraft: }&\displaystyle Q_i(x) = - EI \frac{d^3\,w_i(x)}{d\,x^3} \end{array}</math>
suchen wir jetzt die passenden Gleichungen aus Rand- und Übergangsbedingungen. Und zusätzlich - und das ist hier besonders - brauchen wir noch eine Gleichung für die Seilkraft ''S''.
suchen wir jetzt die passenden Gleichungen aus Rand- und Übergangsbedingungen. Und zusätzlich - und das ist hier besonders - brauchen wir noch eine Gleichung für die Seilkraft ''S''.
# <math>K_C\cdot \Phi_C - M_{C,-} = 0 \text{ mit } M_{C,-} = - E I\cdot w''(x)|_{x=\ell}</math>
# <math>K_C\cdot \Phi_C - M_{C,-} = 0 \text{ mit } M_{C,-} = - E I\cdot w''(x)|_{x=\ell}</math>
Zeile 172:
Zeile 225:
====Aus Rand D (Umlenkrolle für das Seil)====
====Aus Rand D (Umlenkrolle für das Seil)====
Kinematische Verträglichkeit für das Abwickeln des Seils:
'''Kinematische Verträglichkeit für das Abwickeln des Seils'''
# <math>\Delta s_A +\Delta s_B =0</math>
# <math>\Delta s_A +\Delta s_B =0</math>
Zeile 180:
Zeile 233:
Aber mit den Randbedingungen oben steht uns nun ein vollständiges Gleichungssystem für neun Unbekannte - die Integrationskonstanten und S - zur Verfügung.
Aber mit den Randbedingungen oben steht uns nun ein vollständiges Gleichungssystem für neun Unbekannte - die Integrationskonstanten und S - zur Verfügung.
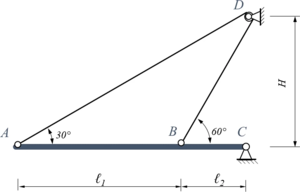
Eine Brücke ABC der Masse mB und homogener Biegesteifigkeit EI ist in C gelenkig gelagert und in A sowie B mit einem Seil verbunden. Das undehnbare Seil wird dabei über eine kleine Rolle (Radius r ≪ ℓ) in D haftungsfrei geführt. In Punkt C ist die Brücke über eine Drehfeder der Steifigkeit KC mit dem Lager verbunden. In A steht eine Person der Masse mA.
Lageplan
Geben Sie die analytische Lösung für ein Euler-Bernoulli-Modell der Brücke in dimensiuonslosen Koordinaten an.
Ermitteln Sie für dabei die Verläufe der Schnittgrößen und Verschiebungen im Balken für diese Parameter:
Lösung mit Maxima
Die Aufgabe ist ein klassisches Randwertproblem mit
zwei Gebieten, in denen ein Euler-Bernoulli-Balken in AB und BC durch eine Streckenlast q0 belastet ist und somit durch die Differentialbeziehung
beschrieben wird;
Rand- und Übergangsbedingungen in den Punkten A, B, C.
Die Biegesteifigkeit des Balkens ist konstant (nicht von "x" abhängig), wir können als den Index "i" beim Flächenmoment also weglassen.
Wir verwenden ein x bzw. ξ als Koordinaten in beiden Gebieten, in der Übersicht sieht das Randwertproblem also so aus:
Rand A
Bereich I
Übergang B
Bereich II
Rand C
Zusätzlich zum "klassischen" Randwertproblem haben wir hier eine geometrische Zwangsbedingung: Durch die Umlenkrolle ist die vertikale Bewegung in den Punkten A und B gekoppelt!
Wie? Das machen wir uns an einem Bild klar:
Geometrische Zwangsbedingung
In linearer Näherung ist der Zusammenhang zwischen der Seil-Abwicklung ΔsA und der vertial-Verschibung WA in Punkt A
.
Analog gilt für Punkt B
.
Da das Seil undehnbar ist, gilt außerdem
Diese zusätzliche Bedingung ist das entscheidende Element dieser Aufgabe.
Header
In dieser Lösung arbeiten wir mit dimensionslosen Koordinaten für die unabhängige Koordinate x und die abhängige Koordinate w(x).
Die Streckenlast auf den Balken ist natürlich seine Gewichtskraft, also
.GeometrieGeometrische Zusammenhänge müssen wir auch anschreiben, so für
mit
.
Und wir wählen noch eine Bezugslänge ℓBez zu
aus der tabellierten Lösung für einen Kragbalken der Länge ℓ und einer Endlast mB g. Das erscheint nicht sonderlich schlau - es gibt Standard -Lastfälle die besser passen würden. Aber dann schleppen wir die ganze Zeit Koeffizienten wie z.B. 5/384 mit durch die Rechnungen - das macht die Arbeit unübersichtlich.
In Bereich I und II gilt dieselbe Bewegungs-Differentialgleichung
,
die wir durch Integration lösen und dann bereichsweise an Rand- und Übergangsbedingungen anpassen. Diese Aufgabe wird etwas übersichtlicher, wenn wir die Auslenkung w und die Ortskoordinate x dimensionslos machen. So wählen wir:
und setzten für die Bezugslänge die Auslenkung eines Kragbalkens unter konstanter Streckenlast (hier qA) an.
Zusätzlich wählen wir eine unabhängige, dimensionslose Ortskoordinaten für die Bereich I und II, die ihren Ursprung in den Punkt A hat:
suchen wir jetzt die passenden Gleichungen aus Rand- und Übergangsbedingungen. Und zusätzlich - und das ist hier besonders - brauchen wir noch eine Gleichung für die Seilkraft S.
Zur besseren Übersicht nennen wir die Schnitt-Momente und -Kräfte nach den jeweiligen Knotenpunkten A, B, C und fügen als Index ein + / - hinzu, um die Seite (+: rechts vom Knoten, -: links vom Knoten) zu kennzeichnen.
Die Normalkräfte N brauchen wir dabei nicht auszuwerten.
Aus Rand "A"
Geometrische Randbedingungen
keine
Kraft- und Momenten-Randbedingungen
Aus Übergang "B"
Geometrische Randbedingungen
Kraft- und Momenten-Randbedingungen
Aus Rand "C"
Geometrische Randbedingungen
Kraft- und Momenten-Randbedingungen
Aus Rand D (Umlenkrolle für das Seil)
Kinematische Verträglichkeit für das Abwickeln des Seils
Ein bisschen exotisch ist, dass wir nun neun Unbekannte haben, nämlich
Aber mit den Randbedingungen oben steht uns nun ein vollständiges Gleichungssystem für neun Unbekannte - die Integrationskonstanten und S - zur Verfügung.
Cookies helfen uns bei der Bereitstellung von numpedia. Durch die Nutzung von numpedia erklärst du dich damit einverstanden, dass wir Cookies speichern.