die wir durch Integration lösen und dann bereichsweise an Rand- und Übergangsbedingungen anpassen. Die Bedeutung der gesuchten Auslenkung ''w'' und seiner Ableitungen sind
die wir durch Integration lösen und dann bereichsweise an Rand- und Übergangsbedingungen anpassen. Die Bedeutung der gesuchten Auslenkung ''w'' und seiner Ableitungen sind
<math>\begin{array}{ll} \ldots\text{ die Auslenkung: }&\displaystyle w_i(x) \\\ldots\text{ die Verdrehung: }&\displaystyle \phi_i(x) = \frac{d\,w_i(x)}{d\,x}\\ \ldots\text{ das Biege-Moment: }&\displaystyle M_i(x) = - E I \frac{d^2\,w_i(x)}{d\,x^2}\\ \ldots\text{ die Querkraft: }&\displaystyle Q_i(x) = - EI \frac{d^3\,w_i(x)}{d\,x^3} \end{array}</math>
::<math>\begin{array}{ll} \ldots\text{ die Auslenkung: }&\displaystyle w_i(x) \\\ldots\text{ die Verdrehung: }&\displaystyle \phi_i(x) = \frac{d\,w_i(x)}{d\,x}\\ \ldots\text{ das Biege-Moment: }&\displaystyle M_i(x) = - E I \frac{d^2\,w_i(x)}{d\,x^2}\\ \ldots\text{ die Querkraft: }&\displaystyle Q_i(x) = - EI \frac{d^3\,w_i(x)}{d\,x^3} \end{array}</math>
Einfacher wird es, wenn wir mit der dimensionslosen Koordinate
Einfacher wird es, wenn wir mit der dimensionslosen Koordinate
Praktisch ist es nun, ''W<sub>ref</sub>'' so zu wählen, dass wir die dimensionslose Koordinate für ''w'' einfach interpretieren können. Aus der Musterlösung für den beidseitig gelenkig gelagerten Euler-Bernoulli-Balken unter konstanter Streckenlast nehmen wir
Praktisch ist es nun, ''W<sub>ref</sub>'' so zu wählen, dass wir die dimensionslose Koordinate für ''w'' einfach interpretieren können. Aus der Musterlösung für den beidseitig gelenkig gelagerten Euler-Bernoulli-Balken unter konstanter Streckenlast nehmen wir
Aber mit den Randbedingungen oben steht uns ein vollständiges Gleichungssystem für diese zehn Unbekannten - die Integrationskonstanten und die Kräfte ''F, B<sub>z</sub>'' - zur Verfügung.
Aber mit den Randbedingungen oben steht uns ein vollständiges Gleichungssystem für diese zehn Unbekannten - die Integrationskonstanten und die Kräfte ''F, B<sub>z</sub>'' - zur Verfügung.
Zeile 207:
Zeile 214:
Auch hier arbeiten wir mit dimensionslosen Größen, hier
Auch hier arbeiten wir mit dimensionslosen Größen, hier
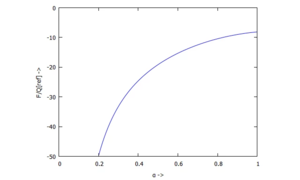
\end{array} \right)</math>.[[Datei:Kig1-21.png|mini|Ratio F/Q]]Die Schaltkraft ''F'' ist negativ! Die Gewichtskraft des Balkens ist für die gewählte Konstellation zu groß, um die Kontaktkraft ohne ''F'' einzustellen. Wir schauen uns an, wie die erforderliche Kraft F über α verläuft:
\end{array} \right)</math>.[[Datei:Kig1-21.png|mini|Ratio F/Q]]Die Schaltkraft ''F'' ist negativ! Die Gewichtskraft des Balkens ist für die gewählte Konstellation zu groß, um die Kontaktkraft ohne ''F'' einzustellen. Wir schauen uns an, wie die erforderliche Kraft F über α verläuft:
Das skizzierte System ist ein elektrischer Schalter, der in C einen Stromkreis schließen soll. Es besteht aus einem durchgehenden elastischen Stab ABC (Euler-Bernoulli-Balken: Masse m, Biegesteifigkeit EI, Länge ℓ), der in A gelenkig gelagert ist, in B mit einer Führung aus drei starren, masselosen Stäben gelenkig verbunden ist und dem Kontakt in C. Die Führung ist durch eine Feder (Steifigkeit k) mit der Umgebung verbunden.
Lageplan
Damit der Schalter zuverlässig funktioniert soll die Kraft F an der Führung so gewählt werden, dass die vorgegebene Kontaktkraft K eingestellt wird.Gesucht ist die analytische Lösung für ein Euler-Bernoulli-Modell der elastischen Struktur.
Wir lösen dazu das Gleichungssystem zur Bestimmung der Integrationskonstanten der Differentialgleichung des Euler-Bernoulli-Balkens und weiterer Unbekannten und geben die grafischen Lösungen für w, w', M und Q an.
Gegeben: K, ℓ, EI, m, g, k
Lösung mit Maxima
Koordinaten
Das System besteht aus den drei starren Stäben und dem elastischen Balken.
Die Verschiebungen und Verbiegungen der Stäbe verstehen wir am besten, wenn wir uns das System einmal im ausgelenkten Zustand ansehen. Gleichgewichtsbedingungen für die Führung erhalten wir aus einfachen Kräfte- und Momentenbilanzen, die Gleichgewichtsbedingungen für den Euler-Bernoulli-Balken ist die Feld-Differentialgleichung, deren Integrationskonstanten wir an die Rand- und Übergangsbedingungen anpassen.
Aus dem Bild sehen wir
,
und wir arbeiten im folgenden mit
.
Wir beginnen, indem wir Führung und Balken von einander freischneiden:
Damit legen wir die Schnittkräfte
Bz und
K
frei. K ist dabei gegeben, F und Bz sind unbekannt.
Wir müssen überlegen, wo wir Bedingungen für diese beiden Größen herbekommen.
Die Lösung der Teilaufgabe für den Euler-Bernoulli-Balken ist ein klassisches Randwertproblem mit
zwei Gebieten, in denen ein Euler-Bernoulli-Balken in AB (Bereich I) und BC (Bereich II) durch eine Streckenlast q0 belastet ist sowie
Rand- und Übergangsbedingungen in den Punkten A, B, C.
Die Biegesteifigkeit des Balkens ist konstant (also nicht von "x" abhängig), die Lösungen in beiden Bereichen ist also bis auf die Integrationskonstanten gleich.
Wir verwenden ein xi bzw. ξi als Ortskoordinaten je Bereich.
Zusätzlich zum "klassischen" Randwertproblem haben wir hier Zwangsbedingung durch die starren Stäbe und die Kontaktkraft.
tmp
In dieser Lösung arbeiten wir mit dimensionslosen Koordinaten für die unabhängige Koordinate x und die abhängige Koordinate w(x).
Header
Text
1+1
tmp
Declarations
Die Streckenlast auf den Balken ist seine Gewichtskraft, also
.
Später werden wir noch die dimensionslose Koordinate
gebrauchen.
1+1
tmp
Integration Of Differential Equation
In Bereich I und II gilt dieselbe Bewegungs-Differentialgleichung
,
die wir durch Integration lösen und dann bereichsweise an Rand- und Übergangsbedingungen anpassen. Die Bedeutung der gesuchten Auslenkung w und seiner Ableitungen sind
Einfacher wird es, wenn wir mit der dimensionslosen Koordinate
.
arbeiten. Dann ist
Praktisch ist es nun, Wref so zu wählen, dass wir die dimensionslose Koordinate für w einfach interpretieren können. Aus der Musterlösung für den beidseitig gelenkig gelagerten Euler-Bernoulli-Balken unter konstanter Streckenlast nehmen wir
und damit
.
Ein Aufintegrieren der Differentialgleichung liefert dann
1+1
tmp
Boundary Conditions
Für die 2*4 = 8 Integrationskonstanten
und die weiteren gesuchten Größen
suchen wir jetzt die passenden Gleichungen aus Rand- und Übergangsbedingungen des Systems.
Die Normalkräfte N brauchen wir dabei nicht auszuwerten.
Rand A.
Aus Rand A:
Geometrische Randbedingungen
Kraft- und Momenten-Randbedingungen
keine
Aus Übergang B:
Übergang B
Geometrische Randbedingungen
Kraft- und Momenten-Randbedingungen
.
Aus Rand C:
Rand C
Geometrische Randbedingungen
Kraft- und Momenten-Randbedingungen
Gleichgewicht an der Führung
Führung
Für die starren Stäbe stellen wir die Summe aller Kräfte im senkrechten Stab auf:
.
Ein bisschen exotisch ist, dass wir nun zehn Unbekannte haben, nämlich
Aber mit den Randbedingungen oben steht uns ein vollständiges Gleichungssystem für diese zehn Unbekannten - die Integrationskonstanten und die Kräfte F, Bz - zur Verfügung.
Auch hier arbeiten wir mit dimensionslosen Größen, hier
,
wobei wir
setzen.
1+1
tmp
Prepare for Solver
Das Gleichungssystem wollen wir als
schreiben. Um die Ergebnisse kompakt darstellen zu können, wählen wir als Parameter
mit den dimensionslosen Größen
.
Damit erhalten wir - hier nach Einsetzen der gegeben System-Parameter:
.
1+1
tmp
Solving
Das Lösen des Gleichungssystems liefert dann
und für
die dimensionslosen Werte
.Ratio F/QDie Schaltkraft F ist negativ! Die Gewichtskraft des Balkens ist für die gewählte Konstellation zu groß, um die Kontaktkraft ohne F einzustellen. Wir schauen uns an, wie die erforderliche Kraft F über α verläuft:
1+1
tmp
Post-Processing
Die Grafen der gesuchten Funktionen tragen wir nun direkt dimensionslos auf:
Cookies helfen uns bei der Bereitstellung von numpedia. Durch die Nutzung von numpedia erklärst du dich damit einverstanden, dass wir Cookies speichern.