Sources/Lexikon/Reibkennlinie: Unterschied zwischen den Versionen
| (Eine dazwischenliegende Version desselben Benutzers wird nicht angezeigt) | |||
| Zeile 31: | Zeile 31: | ||
</syntaxhighlight> | </syntaxhighlight> | ||
}} | }} | ||
[[Datei:Reibkennlinie-02.mp4|mini|Erläuterungen zur Reibkennlinie]] | [[Datei:Reibkennlinie-02.mp4|mini|Erläuterungen zur Reibkennlinie]] | ||
Und so funktionierts:Steigert man die Kraft ''F'' auf den Körper, so "kriecht" der Körper - seine Geschwindigkeit ''v'' bleibt sehr klein. Wählt man also die Schaltstellen v<sub>0</sub> = +/- ε passend klein, dann sieht es so aus, als würde der Körper "haften". Überschreitet ''F'' die maximale Haftkraft, also F > ''μ''<sub>0</sub>''∙N'', dann fällt ''μ(v)'' auf den Reib-Beiwert ab, der Körper wird beschleunigt. | Und so funktionierts:Steigert man die Kraft ''F'' auf den Körper, so "kriecht" der Körper - seine Geschwindigkeit ''v'' bleibt sehr klein. Wählt man also die Schaltstellen v<sub>0</sub> = +/- ε passend klein, dann sieht es so aus, als würde der Körper "haften". Überschreitet ''F'' die maximale Haftkraft, also F > ''μ''<sub>0</sub>''∙N'', dann fällt ''μ(v)'' auf den Reib-Beiwert ab, der Körper wird beschleunigt. | ||
Das Problem: diese Kennlinie ist nicht stetig differenzierbar - Löser, die das zur Schrittweiten-Steuerung voraussetzen "fressen" sich an den Schaltstellen fest. | Das Problem: diese Kennlinie ist nicht stetig differenzierbar - Löser, die das zur Schrittweiten-Steuerung voraussetzen "fressen" sich an den Schaltstellen fest. | ||
<br clear="all"/> | |||
== Verbesserter Ansatz: stückweise mit einem Polynom 5ten Grades == | == Verbesserter Ansatz: stückweise mit einem Polynom 5ten Grades == | ||
| Zeile 139: | Zeile 140: | ||
Besser geht das mit einer stetig fallenden Kennlinie: | Besser geht das mit einer stetig fallenden Kennlinie: | ||
== Stetig fallende Reibkennlinie == | == Verbesserter Ansatz: Stetig fallende Reibkennlinie == | ||
Die gesuchte stetig differenzierbare Kennlinie ''μ(ν)'' mit stetig abnehmendem Reibkoeffizienten setzen wir aus sin- und e-Funktion zusammen. | Die gesuchte stetig differenzierbare Kennlinie ''μ(ν)'' mit stetig abnehmendem Reibkoeffizienten setzen wir aus sin- und e-Funktion zusammen. | ||
Sie muss punkt-symmetrisch sein (die Reibkraft ändert ihr Vorzeichen mit der Orientierung der Relativgeschwindigkeit). Die Sinus-Funktion verwenden wir für den Mittelteil (Haften) und die Exponential-Funktionen für die Gebiete, in denen die Körper aufeinander reiben.:[[Datei:Kw25-03.png|mini|Reibkennline mit stetig fallender Charakteristik - aus Aufgabe [[Gelöste Aufgaben/Kw25|Kw25]]]]Im Mittelteil (blau) setzen wir für die Sinus-Funktion an | Sie muss punkt-symmetrisch sein (die Reibkraft ändert ihr Vorzeichen mit der Orientierung der Relativgeschwindigkeit). Die Sinus-Funktion verwenden wir für den Mittelteil (Haften) und die Exponential-Funktionen für die Gebiete, in denen die Körper aufeinander reiben.:[[Datei:Kw25-03.png|mini|Reibkennline mit stetig fallender Charakteristik - aus Aufgabe [[Gelöste Aufgaben/Kw25|Kw25]]]]Im Mittelteil (blau) setzen wir für die Sinus-Funktion an | ||
<math>\displaystyle \mu = \left\{ \begin{array}{lllll}\ldots&\text{für}&\nu&<-b\\\sin(\pi\;b\;\nu)&\text{für}-b<&\nu&<+b\\\ldots&\text{für}+b<&\nu&\end{array}\right. </math> | ::<math>\displaystyle \mu = \left\{ \begin{array}{lllll}\ldots&\text{für}&\nu&<-b\\\sin(\pi\;b\;\nu)&\text{für}-b<&\nu&<+b\\\ldots&\text{für}+b<&\nu&\end{array}\right. </math> | ||
mit | mit | ||
<math>\displaystyle \nu = \frac{v_r}{v_0}</math>. | ::<math>\displaystyle \nu = \frac{v_r}{v_0}</math>. | ||
Dieses Mittelteil stückeln wir stetig differenzierbar jeweils an eine Exponentialfunktion mit den Parametern ''E'' und ''κ'' an, hier | Dieses Mittelteil stückeln wir stetig differenzierbar jeweils an eine Exponentialfunktion mit den Parametern ''E'' und ''κ'' an, hier | ||
<math>E\cdot e^{\displaystyle \kappa\cdot (b+\nu)} -a</math> | ::<math>E\cdot e^{\displaystyle \kappa\cdot (b+\nu)} -a</math> | ||
mit | mit | ||
<math>\displaystyle E=a-\mathrm{sin}\left( \pi \cdot {{b}^{2}}\right) ,\kappa=-\frac{\pi \cdot b\cdot \mathrm{cos}\left( \pi \cdot {{b}^{2}}\right) }{\mathrm{sin}\left( \pi \cdot {{b}^{2}}\right) -a}</math>. | ::<math>\displaystyle E=a-\mathrm{sin}\left( \pi \cdot {{b}^{2}}\right) ,\kappa=-\frac{\pi \cdot b\cdot \mathrm{cos}\left( \pi \cdot {{b}^{2}}\right) }{\mathrm{sin}\left( \pi \cdot {{b}^{2}}\right) -a}</math>. | ||
Damit ist | Damit ist | ||
<math>\displaystyle \mu = \left\{ \begin{array}{lllll}\left( a-\sin\left( \pi \cdot {{b}^{2}}\right) \right) \cdot {{e}^{\displaystyle -\frac{\pi \cdot b\cdot \mathrm{cos}\left( \pi \cdot {{b}^{2}}\right) \cdot \left( b+\nu\right) }{\mathrm{sin}\left( \pi \cdot {{b}^{2}}\right) -a}}}-a&\text{für}&\nu&<-b\\\sin(\pi\;b\;\nu)&\text{für}-b<&\nu&<+b\\a-\left( a-\sin\left( \pi \cdot {{b}^{2}}\right) \right) \cdot {{e}^{\displaystyle -\frac{\pi \cdot b\cdot \cos\left( \pi \cdot {{b}^{2}}\right) \cdot \left( b-\nu\right) }{\sin\left( \pi \cdot {{b}^{2}}\right) -a}}}&\text{für}+b<&\nu&\end{array}\right. </math> | ::<math>\displaystyle \mu = \left\{ \begin{array}{lllll}\left( a-\sin\left( \pi \cdot {{b}^{2}}\right) \right) \cdot {{e}^{\displaystyle -\frac{\pi \cdot b\cdot \mathrm{cos}\left( \pi \cdot {{b}^{2}}\right) \cdot \left( b+\nu\right) }{\mathrm{sin}\left( \pi \cdot {{b}^{2}}\right) -a}}}-a&\text{für}&\nu&<-b\\\sin(\pi\;b\;\nu)&\text{für}-b<&\nu&<+b\\a-\left( a-\sin\left( \pi \cdot {{b}^{2}}\right) \right) \cdot {{e}^{\displaystyle -\frac{\pi \cdot b\cdot \cos\left( \pi \cdot {{b}^{2}}\right) \cdot \left( b-\nu\right) }{\sin\left( \pi \cdot {{b}^{2}}\right) -a}}}&\text{für}+b<&\nu&\end{array}\right. </math> | ||
| Zeile 199: | Zeile 200: | ||
}} | }} | ||
<hr/> | |||
'''Links''' | '''Links''' | ||
* [[Gelöste Aufgaben/Kw25|Kw25]] | * [[Gelöste Aufgaben/Kw25|Kw25]] | ||
Aktuelle Version vom 21. April 2021, 07:45 Uhr

Reiben oder haften Körper aneinander, so wird ihre geschwindigkeitsabhängige Kontaktkraft K(v) in der Tangentialebene oft durch den Reib- und Haftbeiwert μ bzw. μ0 beschreiben:
mit
Erster Ansatz mit Geradenstücken

Statt zwischen Haften und Reiben zu unterscheiden, kann man mit folgender Kennlinie arbeiten, die Schaltstellen für v0 = +/- ε hat.
Die stückweise definierte Funktion ist:
Maxima Code
Zum Einbauen in Ihr Programm: der Quellcode zur Kennlinie.
/* friction characteristic */
/* piecewise linear */
subst(solve([c[0]+c[1]*(+epsilon)=+b,c[0]+c[1]*2*(+epsilon)=+a],[c[0],c[1]])[1],c[0]+c[1]*v)
mu(a,b,epsilon,v) := if v<=-2*epsilon then -a
elseif v>=+2*epsilon then +a
elseif v<= -epsilon then -((2*b-a)*epsilon+(b-a)*v)/epsilon
elseif v>= +epsilon then -((a-2*b)*epsilon+(b-a)*v)/epsilon
else b*(v/epsilon);
plot2d(mu(0.5,1,0.01,v),[v,-0.1,0.1], [ylabel,"v/V->"], [xlabel,"μ/1->"], [legend, "friction coefficient"]);
Und so funktionierts:Steigert man die Kraft F auf den Körper, so "kriecht" der Körper - seine Geschwindigkeit v bleibt sehr klein. Wählt man also die Schaltstellen v0 = +/- ε passend klein, dann sieht es so aus, als würde der Körper "haften". Überschreitet F die maximale Haftkraft, also F > μ0∙N, dann fällt μ(v) auf den Reib-Beiwert ab, der Körper wird beschleunigt.
Das Problem: diese Kennlinie ist nicht stetig differenzierbar - Löser, die das zur Schrittweiten-Steuerung voraussetzen "fressen" sich an den Schaltstellen fest.
Verbesserter Ansatz: stückweise mit einem Polynom 5ten Grades

Um eine stetig differenzierbare Reibkennlinie zu erhalten, setzten wir stückweise ein Polynom an. Es soll Punkt-symmetrisch sowie an den Übergangsstellen stetig und stetig differenzierbar sein!
Hier arbeiten wir mit der dimensionslosen Geschwindigkeit
und setzen für den mittleren Teil -v0 < v < v0 das Polynom
- .
an.
Dann ist - hier für μ0=1/2 und μ=1/4:
Maxima Code
Zum Einbauen in Ihr Programm: der Quellcode zur Kennlinie.
/* parameter */
params: [mu[0] = 1/2,
mu[1] = 1/4]$
/**** define nonlinear friction characteristic ***/
/* choose generic polynom */
p : lsum(a[i]*nu^i,i,[1,3,5]);
mu(nu,charc) := if abs(nu)<1 then subst(charc, lsum(a[i]*nu^i,i,[1,3,5])) else subst(charc, mu[1])*signum(nu);
/* ... and adapt to these conditions */
bcs : [subst([nu= 1 ], p ) = mu[1],
subst([nu= 1 ], diff(p,nu)) = 0 ,
subst([nu=gamma], diff(p,nu)) = 0 ,
subst([nu=gamma], p ) = mu[0]];
coe : [a[1],a[3],a[5],gamma];
sol: solve(subst(params,bcs),coe)$
charc : append(params,sol[1]);
plot2d(mu(nu,charc),[nu,-2,2], [xlabel,"ν →"], [xlabel,"μ →"])$
Die Gleichung für die Kennlinie können wir nicht analytisch explizit angeben - Sie können die Kennlinie also nicht ohne Maxima in ein anderes Programm übertragen.
Abhilfe schafft dieser Ansatz:
Verbesserter Ansatz: stückweise mit Polynomen 2ten und 3ten Grades

Wir bleiben bei der stetig differenzierbaren Reibkennlinie, suchen nun aber nach einfacheren Polynomen, deren Koeffizienten wir auch explizit in μ0 und μ angeben können. Alles hat seinen Preis: wir brauchen nun zwei Polynome (I und II)für den ersten Teil!
Wir arbeiten weiter mit
und setzen für den mittleren Teil -v0 < v < v0 nun zwei Polynome
an.
Dann ist
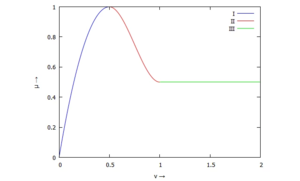
Ein Ausschnitt der Kennlinie mit den Abschnitten I, II und III

Maxima Code
Zum Einbauen in Ihr Programm: der Quellcode zur Kennlinie.
/* parameter */
params : [mu[0]=1, mu[1] = 0.5];
/**** define nonlinear friction characteristic ***/
/* choose generic polynoms for three sections */
r : [sum(a[i]*nu^i,i,0,2),
sum(a[i]*nu^i,i,0,3),
mu[1]];
/* ... and adapt to these conditions */
sol: [solve([subst([nu= 0 ], r[1]) = 0,
subst([nu=1/2], r[1]) = mu[0],
subst([nu=1/2],diff(r[1],nu)) = 0], [a[2],a[1],a[0]])[1],
solve([subst([nu=1/2], r[2]) = mu[0],
subst([nu=1 ], r[2]) = mu[1],
subst([nu=1/2],diff(r[2],nu)) = 0,
subst([nu=1 ],diff(r[2],nu)) = 0], [a[3],a[2],a[1],a[0]])[1]];
r : ratsimp([subst(sol[1],r[1]),subst(sol[2],r[2]),r[3]]);
print(transpose(r));
/* ... and plot ... */
r : subst(nu=t,subst(params,r));
plot2d([[parametric, t, r[1], [t, 0 ,1/2]],
[parametric, t, r[2], [t, 1/2, 1 ]],
[parametric, t, r[3], [t, 1 , 2 ]]], [legend,"I","II","III"],
[xlabel,"ν →"], [ylabel,"μ →"])$
Hier ist die tangentiale Kontaktkraft konstant, wenn der Körper eine relevante Relativgeschwindigkeit gegenüber seiner Unterlage hat. Diese Vorstellung passt oft nicht mit Messungenüberein - außerdem gibt es einen weiteren Nachteil: Die Kennlinie fällt nur in einem ganz kleinen Bereich und es wird schwer, damit im Modell eine Selbsterregung zu erzeugen.
Besser geht das mit einer stetig fallenden Kennlinie:
Verbesserter Ansatz: Stetig fallende Reibkennlinie
Die gesuchte stetig differenzierbare Kennlinie μ(ν) mit stetig abnehmendem Reibkoeffizienten setzen wir aus sin- und e-Funktion zusammen.
Sie muss punkt-symmetrisch sein (die Reibkraft ändert ihr Vorzeichen mit der Orientierung der Relativgeschwindigkeit). Die Sinus-Funktion verwenden wir für den Mittelteil (Haften) und die Exponential-Funktionen für die Gebiete, in denen die Körper aufeinander reiben.:

Im Mittelteil (blau) setzen wir für die Sinus-Funktion an
mit
- .
Dieses Mittelteil stückeln wir stetig differenzierbar jeweils an eine Exponentialfunktion mit den Parametern E und κ an, hier
mit
- .
Damit ist
die gesuchte Kennlinie.
Maxima Code
Zum Einbauen in Ihr Programm: der Quellcode zur Kennlinie.
/* define degressive friction characteristics */
/*********************************************************/
/* parameter */
params: [a=1/2, b = 5/6, V0=0.001];
ch : [sin(b*%pi*nu),0,0];
ch[2]: E*%e^(kappa*(nu+b))-a;
ch[2] : subst(solve([subst([nu=-b],ch[2]=ch[1]),subst([nu=-b],diff(ch[2]=ch[1],nu))],[E,\kappa])[1],ch[2]);
ch[3] : subst([nu=-nu],-ch[2]);
plot2d([[parametric, t, subst(params,subst(t,nu,ch[1])),subst(params,[t,-b, b])],
[parametric, t, subst(params,subst(t,nu,ch[2])),subst(params,[t,-3,-b])],
[parametric, t, subst(params,subst(t,nu,ch[3])),subst(params,[t,+b,+3])]],[legend,"sec. 0","sec -1","sec +1"],
[y,-1,1],
[style, [lines,3,1], [lines,3,2], [lines,3,2]], [xlabel, "Geschwindigkeit v/V0 →"], [ylabel, "Reib-Koeffizient μ/1 →"])$
/**** define nonlinear friction characteristic ***/
fric(nu, a,b) :=
if nu < -b then
(a-sin(%pi*b^2))*%e^(-(%pi*b*cos(%pi*b^2)*(b+nu))/(sin(%pi*b^2)-a))-a /*ch[2]*/
elseif nu > +b then
a-(a-sin(%pi*b^2))*%e^(-(%pi*b*cos(%pi*b^2)*(b-nu))/(sin(%pi*b^2)-a)) /*ch[3]*/
else
sin(%pi*b*nu) /*ch[1]*/
;
Links