Gelöste Aufgaben/UEBL: Unterschied zwischen den Versionen
Keine Bearbeitungszusammenfassung |
Keine Bearbeitungszusammenfassung |
||
| (4 dazwischenliegende Versionen desselben Benutzers werden nicht angezeigt) | |||
| Zeile 7: | Zeile 7: | ||
==Aufgabenstellung== | ==Aufgabenstellung== | ||
Die Problemstellung ist identisch zu [[Gelöste Aufgaben/UEBI|UEBI]] (und [[Gelöste Aufgaben/UEBJ|UEBJ]], [[Gelöste Aufgaben/UEBK|UEBK]]): | |||
<onlyinclude> | Der [[Sources/Lexikon/Euler-Bernoulli-Balken|Euler-Bernoulli-Balken]] ''AB'' wird durch seine Gewichtskraft belastet. Er ist in ''A'' fest eingespannt und hat eine konstante Breite ''b'' sowie eine zwischen ''A'' und ''B'' linear veränderliche Höhe ''h''.<onlyinclude> | ||
[[Datei:UEBF-01.png| | [[Datei:UEBF-01.png|200px|left|mini|Lageplan]] | ||
Gesucht ist | Gesucht ist eine Näherungslösung mit der Methode der Finiten Elementen, die nur Elemente mit stückweise konstanten Querschnitts-Eigenschaften zulassen. | ||
</onlyinclude> | </onlyinclude> | ||
Gegeben sind für den Balken: | |||
* Länge ''ℓ'', Breite ''b,'' | |||
* E-Modul ''E'', Dichte ''ρ'' und | |||
* die Höhe ''h''<sub>0</sub>''=b'' und ''h<sub>1</sub>'' jeweils in ''A'' und ''B''; dazwischen ist die Höhe linear veränderlich. | |||
== Lösung mit Maxima == | == Lösung mit Maxima == | ||
<!--------------------------------------------------------------------------------> | |||
{{MyCodeBlock|title=Header | |||
|text= | |||
Unsere [[Randwertprobleme/Methoden zur Lösung von Randwertproblemen/FEM: Trial-Functions für kubische Ansatz-Polynome|FEM-Formulierung mit kubischen Ansatz-Polynomen]] für [[Sources/Lexikon/Euler-Bernoulli-Balken|Euler-Bernoulli-Balken]] ist auf Stäbe mit elementweise konstantem Querschnitt beschränkt: ''E'' und ''I'' müssen je Element konstant sein. | |||
Für dieses Problem können wir die Formulierung also - nominell - nicht anwenden. Wir müssten im Abschnitt [[Sources/Lexikon/Virtuelle Formänderungsenergie|Virtuelle Formänderungsenergie]] die Integration für linear-veränderliche Querschnittsflächen ansetzen und durchführen. | |||
Das machen wir hier nicht.[[Datei:UEBL-11.png|mini|FE-Modell]]Wir schauen uns an, wie die Lösung für das Ersatz-Modell aussieht, bei dem wir uns den Originalstab durch einen stufenweise abgesetzten Stab ersetzt denken - hier für zwei Elemente. | |||
Die Querschnittseigenschaften je Element seien die des Original-Stabes im Element-Mittelpunkt. | |||
|code= | |code= | ||
<syntaxhighlight lang="lisp" line start=1> | <syntaxhighlight lang="lisp" line start=1> | ||
/*******************************************************/ | |||
/* MAXIMA script */ | |||
/* version: wxMaxima 15.08.2 */ | |||
/* author: Andreas Baumgart */ | |||
/* last updated: 2019-09-01 */ | |||
/* ref: TMC */ | |||
/* description: EBB with I(x), A(x) */ | |||
/* solved as Initial Value Problem */ | |||
/*******************************************************/ | |||
</syntaxhighlight> | </syntaxhighlight> | ||
}} | }} | ||
<!--------------------------------------------------------------------------------> | <!--------------------------------------------------------------------------------> | ||
{{MyCodeBlock|title=Declarations | {{MyCodeBlock|title=Declarations | ||
|text= | |text= | ||
Wir benutzen die Parameter-Deklarationen aus UEBI und laden außerdem die analytische Lösung von dort. | |||
Einziger Unterschied: um die Element-Länge ''ℓ<sub>i</sub>'' in Element "i" eindeutig von der Gesamt-Länge des Stabes zu unterscheiden, wählen wir für die Gesamt-Länge den Parameter ''ℓ<sub>0</sub>'' statt ''ℓ.'' | |||
|code= | |code= | ||
<syntaxhighlight lang="lisp" line start=1> | <syntaxhighlight lang="lisp" line start=1> | ||
1+1 | /************************************************************/ | ||
declare( "ℓ", alphabetic); | |||
declare( "λ", alphabetic); | |||
declare( "ϕ", alphabetic); | |||
/* system parameters */ | |||
params: [q(xi) = A(xi)*rho*g, | |||
A(xi) = b*h(xi), | |||
I(xi) = b*h(xi)^3/12, | |||
h(xi) = H[0]*(1-xi)+ H[1]*xi]; | |||
params: append(params, | |||
solve((H[0]+H[1])/2*b*ℓ[0]*rho=m, rho)); | |||
geometry : [alpha=1/2]; | |||
dimless: [x = xi*ℓ, H[0]=b, H[1]=alpha*b]; | |||
/* make equations of motion dim'less with load case #1 from Gross e.a., same as UEBI */ | |||
reference : [W[ref] = q[ref]*ℓ[0]^4/(8*EI[ref]), ϕ[ref] = q[ref]*ℓ[0]^3/(6*EI[ref]), M[ref] = m*g*ℓ[0]/2, Q[ref] = m*g, q[ref] = m*g/ℓ[0], EI[ref]=E*b*((H[0]+H[1])/2)^3/12]; | |||
/* load analytic solutions as discrete tables from UEBI */ | |||
file_search_maxima: append(file_search_maxima, ["C:/Users/XXXX/OneDrive/Confluence Sources/UEBI/"]); | |||
batch("analyticSolFromUEBI.data")$ | |||
</syntaxhighlight> | </syntaxhighlight> | ||
}} | }} | ||
<!--------------------------------------------------------------------------------> | <!--------------------------------------------------------------------------------> | ||
{{MyCodeBlock|title=FEM-Formulation | {{MyCodeBlock|title=FEM-Formulation | ||
|text= | |text= | ||
Wir verwenden aus Abschnitt FEM-Formulierung für den Euler-Bernoulli-Balken | |||
<ul> | |||
<li>die Standard Element-Steifigkeitsmatrix | |||
::<math>\displaystyle \underline{\underline{K}}_i = \frac{E I_i}{\ell_i^3} \; | |||
\begin{pmatrix}12 & 6\cdot {{\ell}_{i}} & -12 & 6\cdot {{\ell}_{i}}\\ 6\cdot {{\ell}_{i}} & 4\cdot {{\ell}_{i}^{2}} & -6\cdot {{\ell}_{i}} & 2\cdot {{\ell}_{i}^{2}}\\ -12 & -6\cdot {{\ell}_{i}} & 12 & -6\cdot {{\ell}_{i}}\\ 6\cdot {{\ell}_{i}} & 2\cdot {{\ell}_{i}^{2}} & -6\cdot {{\ell}_{i}} & 4\cdot {{\ell}_{i}^{2}}\end{pmatrix}</math></li> | |||
<li>und die Element-"Rechte Seite" | |||
::<math>\underline{P}_i = \rho\,A_i\,g\, \ell_i \cdot | |||
\begin{pmatrix}\displaystyle\frac{1}{2}\\ \displaystyle \frac{{{\ell}_{i}}}{12}\\ \displaystyle \frac{1}{2}\\ -\displaystyle \frac{{{\ell}_{i}}}{12}\end{pmatrix}</math>.</li> | |||
</ul> | |||
Hier dürfen also der (mittlere) Querschnittsflächeninhalt ''A<sub>i</sub>'', das (mittlere) Flächenmoment ''I<sub>i</sub>'' und die Länge ''ℓ<sub>i</sub>'' je Element unterschiedliche Werte annehmen. | |||
Ab hier haben wir einige Freiheiten und die füllen wir folgendermaßen: | |||
<ul> | |||
<li>Die Anzahl der Finiten Element ist 3.</li> | |||
<li>Die Element-Längen wählen wir so, dass sie sich in Stab-Längsrichtung verdoppeln, also | |||
<math>\ell_{i+1} = 2 \cdot \ell_i</math></li> | |||
</ul> | |||
Dann sind mit | |||
::<math>\lambda_i := \ell_i/\ell_0</math> | |||
die relativen Element-Längen | |||
::<math>\displaystyle {{\lambda}_{1}}=\frac{1}{7},{{\lambda}_{2}}=\frac{2}{7},{{\lambda}_{3}}=\frac{4}{7}</math>. | |||
Für diese drei Element bestimmen wir die "mid-point"-Querschnittseigenschaften zu | |||
::<math>\displaystyle | |||
\tilde{A}_1 = \frac{\left( \frac{13\cdot {{h}_{0}}}{7}+\frac{{{h}_{1}}}{7}\right) \cdot b}{2}, | |||
\tilde{A}_2 = \frac{\left( \frac{10\cdot {{h}_{0}}}{7}+\frac{4\cdot {{h}_{1}}}{7}\right) \cdot b}{2}, | |||
\tilde{A}_3 = \frac{\left( \frac{4\cdot {{h}_{0}}}{7}+\frac{10\cdot {{h}_{1}}}{7}\right) \cdot b}{2}</math> | |||
und | |||
::<math>\displaystyle | |||
\tilde{I}_1 = \frac{{{\left( \frac{13\cdot {{h}_{0}}}{7}+\frac{{{h}_{1}}}{7}\right) }^{3}}\cdot b}{96}, | |||
\tilde{I}_2 = \frac{{{\left( \frac{10\cdot {{h}_{0}}}{7}+\frac{4\cdot {{h}_{1}}}{7}\right) }^{3}}\cdot b}{96}, | |||
\tilde{I}_3 = \frac{{{\left( \frac{4\cdot {{h}_{0}}}{7}+\frac{10\cdot {{h}_{1}}}{7}\right) }^{3}}\cdot b}{96}</math> | |||
Einsetzen und komponieren der Gesamt-Systemmatrix - mit Einarbeiten der geometrischen Randbedingungen - liefert | |||
::<math>\frac{{{b}^{4}}\cdot E}{{{\ell}_{0}^{3}}}\cdot | |||
\begin{pmatrix}\frac{21411}{64} & -\frac{16227\cdot {{\ell}_{0}}}{896} & -27 & \frac{27\cdot {{\ell}_{0}}}{7} & 0 & 0\\ -\frac{16227\cdot {{\ell}_{0}}}{896} & \frac{8865\cdot {{\ell}_{0}^{2}}}{3136} & -\frac{27\cdot {{\ell}_{0}}}{7} & \frac{18\cdot {{\ell}_{0}^{2}}}{49} & 0 & 0\\ -27 & -\frac{27\cdot {{\ell}_{0}}}{7} & \frac{14553}{512} & -\frac{6183\cdot {{\ell}_{0}}}{1792} & -\frac{729}{512} & \frac{729\cdot {{\ell}_{0}}}{1792}\\ \frac{27\cdot {{\ell}_{0}}}{7} & \frac{18\cdot {{\ell}_{0}^{2}}}{49} & -\frac{6183\cdot {{\ell}_{0}}}{1792} & \frac{1395\cdot {{\ell}_{0}^{2}}}{1568} & -\frac{729\cdot {{\ell}_{0}}}{1792} & \frac{243\cdot {{\ell}_{0}^{2}}}{3136}\\ 0 & 0 & -\frac{729}{512} & -\frac{729\cdot {{\ell}_{0}}}{1792} & \frac{729}{512} & -\frac{729\cdot {{\ell}_{0}}}{1792}\\ 0 & 0 & \frac{729\cdot {{\ell}_{0}}}{1792} & \frac{243\cdot {{\ell}_{0}^{2}}}{3136} & -\frac{729\cdot {{\ell}_{0}}}{1792} & \frac{243\cdot {{\ell}_{0}^{2}}}{1568}\end{pmatrix} | |||
\cdot \underline{Q} = | |||
m\,g\cdot \begin{pmatrix}\frac{25}{98}\\ \frac{23\cdot {{\ell}_{0}}}{4116}\\ \frac{20}{49}\\ \frac{16\cdot {{\ell}_{0}}}{1029}\\ \frac{12}{49}\\ -\frac{8\cdot {{\ell}_{0}}}{343}\end{pmatrix}</math>. | |||
|code= | |code= | ||
<syntaxhighlight lang="lisp" line start=1> | <syntaxhighlight lang="lisp" line start=1> | ||
1+1 | |||
/*****************************************************************/ | |||
/* FEM-Formulation */ | |||
NOE : 3; /* number of elements */ | |||
NON : NOE+1; /* number of nodes */ | |||
/* element matrices */ | |||
K[i] : (E*I[i]/ℓ[i]^3)*matrix([12,6*ℓ[i],-12,6*ℓ[i]], | |||
[6*ℓ[i],4*ℓ[i]^2,-6*ℓ[i],2*ℓ[i]^2], | |||
[-12,-6*ℓ[i],12,-6*ℓ[i]], | |||
[6*ℓ[i],2*ℓ[i]^2,-6*ℓ[i],4*ℓ[i]^2]); | |||
P[i] : rho*A[i]*g*ℓ[i]*matrix([ 1/2 ], | |||
[ ℓ[i]/12], | |||
[ 1/2 ], | |||
[-ℓ[i]/12]); | |||
/* element lengths */ | |||
lengths : solve(append([sum(λ[i],i,1,NOE)=1], makelist(λ[i]=2*λ[i-1],i,2,NOE)), makelist(λ[i],i,1,NOE))[1]; | |||
xCoord : subst(lengths, makelist(sum(λ[i],i,1,j),j,0,NOE)); | |||
/* element cross sectional properties */ | |||
height : makelist(subst([xi=xCoord[i]],subst(params,h(xi))),i,1,NON); | |||
/** discrete proeprties at element mid-point-sections */ | |||
Amp : makelist( (height[i]+height[i+1])/2 * b, i,1,NOE); | |||
Imp : makelist( ((height[i]+height[i+1])/2)^3/12 * b, i,1,NOE); | |||
/* define all element matrices */ | |||
for e:1 thru NOE do ( | |||
K[e] : ratsimp(subst(geometry,subst(lengths,subst(dimless,subst([ℓ[e]=ℓ[0]*λ[e], A[e]=Amp[e], I[e]=Imp[e]], subst([i=e], K[i])))))), | |||
P[e] : ratsimp(subst(geometry,subst(lengths,subst(dimless,subst([ℓ[e]=ℓ[0]*λ[e], A[e]=Amp[e], I[e]=Imp[e]], subst([i=e], P[i]))))))); | |||
/* compose system matrix */ | |||
K[0] : zeromatrix(2*NON,2*NON); | |||
P[0] : zeromatrix(2*NON,1); | |||
for ele:1 thru NOE do ( | |||
for row:1 thru 4 do ( | |||
P[0][2*(ele-1)+row,1] : P[0][2*(ele-1)+row,1] + P[ele][row,1], | |||
for col:1 thru 4 do ( | |||
K[0][2*(ele-1)+row,2*(ele-1)+col] : K[0][2*(ele-1)+row,2*(ele-1)+col] + K[ele][row,col]))); | |||
/* incorporate bounday conditions */ | |||
AA : submatrix(1,2,K[0],1,2); | |||
bb : submatrix(1,2,P[0]); | |||
</syntaxhighlight> | </syntaxhighlight> | ||
}} | }} | ||
<!--------------------------------------------------------------------------------> | <!--------------------------------------------------------------------------------> | ||
{{MyCodeBlock|title=Solving | {{MyCodeBlock|title=Solving | ||
|text= | |text= | ||
Das lineare Gleichungssystem lösen wir mit der Referenz-Auslenkung | |||
::<math>\displaystyle \hat{W} = \frac{q_{ref}\,\ell_0^4}{8\,E\,I_{ref}}</math> | |||
und | |||
::<math>\displaystyle q_{ref} = \frac{m\,g}{\ell_0}, E\,I_{ref}=E\,b\,\frac{\left(\displaystyle \frac{h_0+h_1}{2}\right)^3}{12}</math> | |||
zu | |||
::<math>\begin{array}{ccl} | |||
\displaystyle \frac{ W_0}{\hat{W}} &=& 0,\\ | |||
\displaystyle \frac{\Phi_0}{\hat{W}} &=& 0,\\ | |||
\displaystyle \frac{ W_1}{\hat{W}} &=& 0.016,\\ | |||
\displaystyle \frac{\Phi_1}{\hat{W}} &=& \displaystyle \frac{0.2093}{\ell_0},\\ | |||
\displaystyle \frac{ W_2}{\hat{W}} &=& 0.1317,\\ | |||
\displaystyle \frac{\Phi_2}{\hat{W}} &=& \displaystyle \frac{0.5545}{\ell_0},\\ | |||
\displaystyle \frac{ W_3}{\hat{W}} &=& 0.5937,\\ | |||
\displaystyle \frac{\Phi_3}{\hat{W}} &=& \displaystyle \frac{0.8932}{\ell_0} | |||
\end{array}</math> | |||
mit den Bezeichnungen nach Abschnitt [[Randwertprobleme/Methoden zur Lösung von Randwertproblemen/FEM: Trial-Functions für kubische Ansatz-Polynome|FEM: Trial-Functions für kubische Ansatz-Polynome]]. | |||
|code= | |code= | ||
<syntaxhighlight lang="lisp" line start=1> | <syntaxhighlight lang="lisp" line start=1> | ||
1 | /***************************************************************************/ | ||
/* solve */ | |||
sol: ratsimp(subst(geometry,subst(dimless,subst(params,linsolve_by_lu(AA,bb)))))[1]; | |||
nodalSol: subst(geometry,subst(dimless,subst(reference,flatten(append( | |||
[ W [ 0 ] = 0 , | |||
Phi[ 0 ] = 0 ], | |||
makelist( | |||
[ W [i] = sol[2*i-1][1], | |||
Phi[i] = sol[2*i ][1]],i,1,NOE)))))); | |||
</syntaxhighlight> | </syntaxhighlight> | ||
}} | }} | ||
<!--------------------------------------------------------------------------------> | <!--------------------------------------------------------------------------------> | ||
{{MyCodeBlock|title=Post-Processing | {{MyCodeBlock|title=Post-Processing | ||
|text= | |text= | ||
Die Ergebnisse schauen wir uns als dimensionsloser Darstellung an, wobei wir wie in UEBI die Standard-Lösungen für den Balken unter konstanter Streckenlast als Referenz-Lösung ansetzen. | |||
Wir finden | |||
<ul> | |||
<li>... für die Auslenkung ''w'':<br/>[[Datei:UEBL-31.png|mini|none|Biegelinie w(x)]]</li> | |||
<li>... für den Kippwinkel ''ϕ'':<br/>[[Datei:UEBL-32.png|mini|none|Kippwinkel ''ϕ(x)'']]</li> | |||
<li>... für das Biegemoment ''M'':<br/>[[Datei:UEBL-33.png|mini|none|Biegemomentenverlauf ''M(x)'']]</li> | |||
<li>... für die Querkraft ''Q'':<br/>[[Datei:UEBL-34.png|mini|none|Querkraftverlauf ''Q(x)'']]</li> | |||
</ul> | |||
|code= | |code= | ||
<syntaxhighlight lang="lisp" line start=1> | <syntaxhighlight lang="lisp" line start=1> | ||
1+1 | /***************************************************************************/ | ||
/* plot results */ | |||
/* Trial-Fucntions */ | |||
phi : [ (xi-1)^2*(2*xi+1), | |||
ℓ[i]* xi *( xi-1)^2, | |||
- xi^2 *(2*xi-3), | |||
ℓ[i]* xi^2 *( xi-1)]; | |||
textlabels : ["<- w(x)/w[ref]", "<- w'(x)/ϕ[ref]", "M(x)/(m*g*ℓ/2) ->", "Q(x)/(m g) ->"]; | |||
/* diagrams | |||
analyticSolution : [WA,PhiA,MA,QA]$ /* from file .... */ */ | |||
for diag:1 thru 4 do ( | |||
/* pick a reference value to plot dimensionless */ | |||
Ref : [W[ref], ϕ[ref], M[ref], Q[ref]][diag], | |||
toPlot : ratsimp(makelist([parametric, xCoord[e]*(1-t)+xCoord[e+1]*t, | |||
subst(geometry,subst(dimless,subst(reference,subst([xi=t],subst(lengths,subst(nodalSol,subst([i=e],subst([ℓ[i]=λ[i]*ℓ[0]], | |||
/* factor is 1 or -EI - depending on property to plot */ | |||
[1,1,-E*Imp[e],-E*Imp[e]][diag]* | |||
sum( [W[i-1],Phi[i-1],W[i],Phi[i]][j]*diff(phi[j],xi,diag-1)/ℓ[i]^(diag-1),j,1,4) | |||
)))/Ref))))), [t,0,1]],e,1,NOE)), | |||
/* also plot the analytical solution */ | |||
toPlot: append([[discrete, analyticSolution[diag]]],toPlot), | |||
preamble: if diag<=2 then "set yrange [] reverse" else "set yrange []", | |||
plot2d(toPlot, [legend, "analytic", "Element 1", "Element 2", "Element 3", "Element 4", "Element 5"], | |||
[gnuplot_preamble, preamble], | |||
[xlabel, "x/ℓ ->"], | |||
[ylabel, textlabels[diag]]) )$ | |||
</syntaxhighlight> | </syntaxhighlight> | ||
}} | }} | ||
<hr/> | <hr/> | ||
'''Links''' | '''Links''' | ||
* | * [[Gelöste Aufgaben/UEBI|UEBI]] (analytischer Lösung), [[Gelöste Aufgaben/UEBJ|UEBJ]], [[Gelöste Aufgaben/UEBK|UEBK]] | ||
'''Literature''' | '''Literature''' | ||
* ... | * ... | ||
Aktuelle Version vom 19. April 2021, 05:49 Uhr
Aufgabenstellung
Die Problemstellung ist identisch zu UEBI (und UEBJ, UEBK):
Der Euler-Bernoulli-Balken AB wird durch seine Gewichtskraft belastet. Er ist in A fest eingespannt und hat eine konstante Breite b sowie eine zwischen A und B linear veränderliche Höhe h.

Gesucht ist eine Näherungslösung mit der Methode der Finiten Elementen, die nur Elemente mit stückweise konstanten Querschnitts-Eigenschaften zulassen.
Gegeben sind für den Balken:
- Länge ℓ, Breite b,
- E-Modul E, Dichte ρ und
- die Höhe h0=b und h1 jeweils in A und B; dazwischen ist die Höhe linear veränderlich.
Lösung mit Maxima
Header
Unsere FEM-Formulierung mit kubischen Ansatz-Polynomen für Euler-Bernoulli-Balken ist auf Stäbe mit elementweise konstantem Querschnitt beschränkt: E und I müssen je Element konstant sein.
Für dieses Problem können wir die Formulierung also - nominell - nicht anwenden. Wir müssten im Abschnitt Virtuelle Formänderungsenergie die Integration für linear-veränderliche Querschnittsflächen ansetzen und durchführen.
Das machen wir hier nicht.

Wir schauen uns an, wie die Lösung für das Ersatz-Modell aussieht, bei dem wir uns den Originalstab durch einen stufenweise abgesetzten Stab ersetzt denken - hier für zwei Elemente.
Die Querschnittseigenschaften je Element seien die des Original-Stabes im Element-Mittelpunkt.
/*******************************************************/
/* MAXIMA script */
/* version: wxMaxima 15.08.2 */
/* author: Andreas Baumgart */
/* last updated: 2019-09-01 */
/* ref: TMC */
/* description: EBB with I(x), A(x) */
/* solved as Initial Value Problem */
/*******************************************************/
Declarations
Wir benutzen die Parameter-Deklarationen aus UEBI und laden außerdem die analytische Lösung von dort.
Einziger Unterschied: um die Element-Länge ℓi in Element "i" eindeutig von der Gesamt-Länge des Stabes zu unterscheiden, wählen wir für die Gesamt-Länge den Parameter ℓ0 statt ℓ.
/************************************************************/
declare( "ℓ", alphabetic);
declare( "λ", alphabetic);
declare( "ϕ", alphabetic);
/* system parameters */
params: [q(xi) = A(xi)*rho*g,
A(xi) = b*h(xi),
I(xi) = b*h(xi)^3/12,
h(xi) = H[0]*(1-xi)+ H[1]*xi];
params: append(params,
solve((H[0]+H[1])/2*b*ℓ[0]*rho=m, rho));
geometry : [alpha=1/2];
dimless: [x = xi*ℓ, H[0]=b, H[1]=alpha*b];
/* make equations of motion dim'less with load case #1 from Gross e.a., same as UEBI */
reference : [W[ref] = q[ref]*ℓ[0]^4/(8*EI[ref]), ϕ[ref] = q[ref]*ℓ[0]^3/(6*EI[ref]), M[ref] = m*g*ℓ[0]/2, Q[ref] = m*g, q[ref] = m*g/ℓ[0], EI[ref]=E*b*((H[0]+H[1])/2)^3/12];
/* load analytic solutions as discrete tables from UEBI */
file_search_maxima: append(file_search_maxima, ["C:/Users/XXXX/OneDrive/Confluence Sources/UEBI/"]);
batch("analyticSolFromUEBI.data")$
FEM-Formulation
Wir verwenden aus Abschnitt FEM-Formulierung für den Euler-Bernoulli-Balken
- die Standard Element-Steifigkeitsmatrix
- und die Element-"Rechte Seite"
- .
Hier dürfen also der (mittlere) Querschnittsflächeninhalt Ai, das (mittlere) Flächenmoment Ii und die Länge ℓi je Element unterschiedliche Werte annehmen.
Ab hier haben wir einige Freiheiten und die füllen wir folgendermaßen:
- Die Anzahl der Finiten Element ist 3.
- Die Element-Längen wählen wir so, dass sie sich in Stab-Längsrichtung verdoppeln, also
Dann sind mit
die relativen Element-Längen
- .
Für diese drei Element bestimmen wir die "mid-point"-Querschnittseigenschaften zu
und
Einsetzen und komponieren der Gesamt-Systemmatrix - mit Einarbeiten der geometrischen Randbedingungen - liefert
- .
/*****************************************************************/
/* FEM-Formulation */
NOE : 3; /* number of elements */
NON : NOE+1; /* number of nodes */
/* element matrices */
K[i] : (E*I[i]/ℓ[i]^3)*matrix([12,6*ℓ[i],-12,6*ℓ[i]],
[6*ℓ[i],4*ℓ[i]^2,-6*ℓ[i],2*ℓ[i]^2],
[-12,-6*ℓ[i],12,-6*ℓ[i]],
[6*ℓ[i],2*ℓ[i]^2,-6*ℓ[i],4*ℓ[i]^2]);
P[i] : rho*A[i]*g*ℓ[i]*matrix([ 1/2 ],
[ ℓ[i]/12],
[ 1/2 ],
[-ℓ[i]/12]);
/* element lengths */
lengths : solve(append([sum(λ[i],i,1,NOE)=1], makelist(λ[i]=2*λ[i-1],i,2,NOE)), makelist(λ[i],i,1,NOE))[1];
xCoord : subst(lengths, makelist(sum(λ[i],i,1,j),j,0,NOE));
/* element cross sectional properties */
height : makelist(subst([xi=xCoord[i]],subst(params,h(xi))),i,1,NON);
/** discrete proeprties at element mid-point-sections */
Amp : makelist( (height[i]+height[i+1])/2 * b, i,1,NOE);
Imp : makelist( ((height[i]+height[i+1])/2)^3/12 * b, i,1,NOE);
/* define all element matrices */
for e:1 thru NOE do (
K[e] : ratsimp(subst(geometry,subst(lengths,subst(dimless,subst([ℓ[e]=ℓ[0]*λ[e], A[e]=Amp[e], I[e]=Imp[e]], subst([i=e], K[i])))))),
P[e] : ratsimp(subst(geometry,subst(lengths,subst(dimless,subst([ℓ[e]=ℓ[0]*λ[e], A[e]=Amp[e], I[e]=Imp[e]], subst([i=e], P[i])))))));
/* compose system matrix */
K[0] : zeromatrix(2*NON,2*NON);
P[0] : zeromatrix(2*NON,1);
for ele:1 thru NOE do (
for row:1 thru 4 do (
P[0][2*(ele-1)+row,1] : P[0][2*(ele-1)+row,1] + P[ele][row,1],
for col:1 thru 4 do (
K[0][2*(ele-1)+row,2*(ele-1)+col] : K[0][2*(ele-1)+row,2*(ele-1)+col] + K[ele][row,col])));
/* incorporate bounday conditions */
AA : submatrix(1,2,K[0],1,2);
bb : submatrix(1,2,P[0]);
Solving
Das lineare Gleichungssystem lösen wir mit der Referenz-Auslenkung
und
zu
mit den Bezeichnungen nach Abschnitt FEM: Trial-Functions für kubische Ansatz-Polynome.
/***************************************************************************/
/* solve */
sol: ratsimp(subst(geometry,subst(dimless,subst(params,linsolve_by_lu(AA,bb)))))[1];
nodalSol: subst(geometry,subst(dimless,subst(reference,flatten(append(
[ W [ 0 ] = 0 ,
Phi[ 0 ] = 0 ],
makelist(
[ W [i] = sol[2*i-1][1],
Phi[i] = sol[2*i ][1]],i,1,NOE))))));
Post-Processing
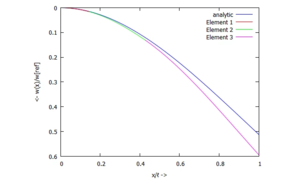
Die Ergebnisse schauen wir uns als dimensionsloser Darstellung an, wobei wir wie in UEBI die Standard-Lösungen für den Balken unter konstanter Streckenlast als Referenz-Lösung ansetzen.
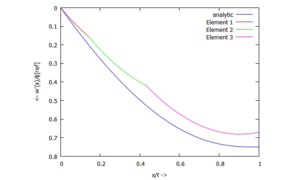
Wir finden
- ... für die Auslenkung w:
Biegelinie w(x) - ... für den Kippwinkel ϕ:
Kippwinkel ϕ(x) - ... für das Biegemoment M:
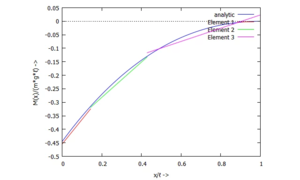
Biegemomentenverlauf M(x) - ... für die Querkraft Q:
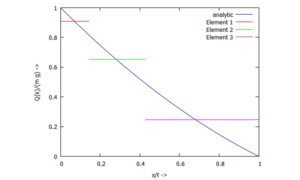
Querkraftverlauf Q(x)




/***************************************************************************/
/* plot results */
/* Trial-Fucntions */
phi : [ (xi-1)^2*(2*xi+1),
ℓ[i]* xi *( xi-1)^2,
- xi^2 *(2*xi-3),
ℓ[i]* xi^2 *( xi-1)];
textlabels : ["<- w(x)/w[ref]", "<- w'(x)/ϕ[ref]", "M(x)/(m*g*ℓ/2) ->", "Q(x)/(m g) ->"];
/* diagrams
analyticSolution : [WA,PhiA,MA,QA]$ /* from file .... */ */
for diag:1 thru 4 do (
/* pick a reference value to plot dimensionless */
Ref : [W[ref], ϕ[ref], M[ref], Q[ref]][diag],
toPlot : ratsimp(makelist([parametric, xCoord[e]*(1-t)+xCoord[e+1]*t,
subst(geometry,subst(dimless,subst(reference,subst([xi=t],subst(lengths,subst(nodalSol,subst([i=e],subst([ℓ[i]=λ[i]*ℓ[0]],
/* factor is 1 or -EI - depending on property to plot */
[1,1,-E*Imp[e],-E*Imp[e]][diag]*
sum( [W[i-1],Phi[i-1],W[i],Phi[i]][j]*diff(phi[j],xi,diag-1)/ℓ[i]^(diag-1),j,1,4)
)))/Ref))))), [t,0,1]],e,1,NOE)),
/* also plot the analytical solution */
toPlot: append([[discrete, analyticSolution[diag]]],toPlot),
preamble: if diag<=2 then "set yrange [] reverse" else "set yrange []",
plot2d(toPlot, [legend, "analytic", "Element 1", "Element 2", "Element 3", "Element 4", "Element 5"],
[gnuplot_preamble, preamble],
[xlabel, "x/ℓ ->"],
[ylabel, textlabels[diag]]) )$
Links
Literature
- ...