(2 dazwischenliegende Versionen desselben Benutzers werden nicht angezeigt)
Zeile 7:
Zeile 7:
[[Category:Dynamik]]
[[Category:Dynamik]]
[[Category:Prinzip der virtuellen Arbeit]]
[[Category:Prinzip der virtuellen Arbeit]]
==Aufgabenstellung==
==Aufgabenstellung==
Wir schauen uns die Lösungsanteile für die Bewegungsgleichung des Zwei-Masse-Schwinger an: welche Rolle spielen die homogene und partikulare Lösung?
Wir schauen uns die Lösungsanteile für die Bewegungsgleichung des Zwei-Masse-Schwinger an: welche Rolle spielen die homogene und partikulare Lösung?
<onlyinclude>
<onlyinclude>
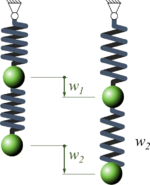
[[Datei:FEAE-01.png|mini|80px|Lageplan]]
[[Datei:FEAE-01.png|left|mini|80px|Lageplan]]
Gesucht ist Gesamtlösung des Systems im Zeitbereich beim Loslassen der beiden Massen aus der Referenz-Konfiguration, bei der beide Federn entspannt sind. Wir stellen die Bewegungsgleichung mit dem [[Werkzeuge/Gleichgewichtsbedingungen/Arbeitsprinzipe der Analytischen Mechanik/Prinzip der virtuellen Verrückungen|Prinzip der virtuellen Verrückungen]] auf.
Gesucht ist Gesamtlösung des Systems im Zeitbereich beim Loslassen der beiden Massen aus der Referenz-Konfiguration, bei der beide Federn entspannt sind. Wir stellen die Bewegungsgleichung mit dem [[Werkzeuge/Gleichgewichtsbedingungen/Arbeitsprinzipe der Analytischen Mechanik/Prinzip der virtuellen Verrückungen|Prinzip der virtuellen Verrückungen]] auf.
</onlyinclude>
</onlyinclude>
Zeile 42:
Zeile 38:
Für dieses System "kennen" wir die Eigenkreisfrequenz
Für dieses System "kennen" wir die Eigenkreisfrequenz
::<math>\displaystyle \omega_0 = \sqrt{\displaystyle\frac{k_0}{m_0}} \text{ und } \omega = \frac{2\pi}{T}</math>.
::<math>\displaystyle \omega_0 = \sqrt{\displaystyle\frac{k_0}{m_0}} \text{ und } \omega_0 = \frac{2\pi}{T}</math>.
Aus diesem Modell "leihen" wir uns die Bezugszeit zu
Aus diesem Modell "leihen" wir uns die Bezugszeit zu
Wir schauen uns die Lösungsanteile für die Bewegungsgleichung des Zwei-Masse-Schwinger an: welche Rolle spielen die homogene und partikulare Lösung?
Lageplan
Gesucht ist Gesamtlösung des Systems im Zeitbereich beim Loslassen der beiden Massen aus der Referenz-Konfiguration, bei der beide Federn entspannt sind. Wir stellen die Bewegungsgleichung mit dem Prinzip der virtuellen Verrückungen auf.
Die Gleichgewichtsbedingung mit dem Prinzip der virtuellen Verrückungen lautet
.
Aufgelöst nach den Koeffizienten der virtuellen Verrückungen folgt die gewöhnliche, lineare Differentialgleichung:
.
In dieser Beziehung stehen jetzt nur noch m0 und k0 - die Indizes "0" können wir also ab hier weglassen. In Matrix-Schreibweise lautet die Bewegungsgleichung jetzt:
Die Lösung des Anfangswertproblems setzt sich aus zwei Teilen zusammen:
der partikularen Lösung, die die Rechte Seite "G" erfüllt und
der homogenen Lösung, die die Rechte Seite "0" erfüllt.
Die Gesamtlösung Qt setzt sich nun - bei diesem linearen System - additiv aus partikularer Qp und Qh homogener Lösung zusammen:
/****************totalsolution*/Q[t]:Q[p]+Q[h]
Right-Hand-Side Approach
Die rechte Seite der Bewegungsgleichung G ist nicht zeitabhängig - sie ist statisch. Also ist auch die Lösung Qp - die partikulare Lösung - statisch, wir suchen nach der Lösung des Gleichungssystems
im Zeitbereich, angepasst an die Anfangsbedingungen, sieht nun so aus:
Ergebnis-Plots für w1(t), w2(t).
Interessant ist die separate Auftragung der Lösungsanteile nach partikularer Lösung (Index "p") und den beiden homogenen Lösungsanteilen (Index "h1", "h2"). Man erkennt, wie die Summe jeweils der blauen und der roten Anteile die Gesamtlösung ergibt.
Cookies helfen uns bei der Bereitstellung von numpedia. Durch die Nutzung von numpedia erklärst du dich damit einverstanden, dass wir Cookies speichern.