(4 dazwischenliegende Versionen desselben Benutzers werden nicht angezeigt)
Zeile 12:
Zeile 12:
==Aufgabenstellung==
==Aufgabenstellung==
Ein starrer Stab ''AB'' (Massenmoment ''J<sub>A</sub>'', Länge ''ℓ<sub>1</sub>'') wird aus dem Winkel ''φ<sub>0</sub>'' im Erdschwerefeld losgelassen und stößt in ''C'' auf einen Anschlag. Der Stoß zwischen Stab und Oberfläche sei ideal-elastisch. Gefragt ist eine numerische Lösung des Problems als Anfangswertproblem.
Gesucht ist die nichtlineare Bewegungsgleichung und die numerische Lösung
Ein starrer Stab ''AB'' (Massenmoment ''J<sub>A</sub>'', Länge ''ℓ<sub>1</sub>'') wird aus dem Winkel ''φ<sub>0</sub>'' im Erdschwerefeld losgelassen und stößt in ''C'' auf einen Anschlag. Der Stoß zwischen Stab und Oberfläche sei ideal-elastisch.
als Anfangswertproblem.</onlyinclude>
Gesucht ist die nichtlineare Bewegungsgleichung und die numerische Lösung als Anfangswertproblem.</onlyinclude>
Dabei denken wir uns den Anschlag als elastische Feder, die nur für ''φ<-π/2'' Kontakt zum Stab hat. Die Federkraft ist also Null, solange der Stab die Oberfläche in ''C'' nicht berührt und sie ist proportional zur Federkompression ''w'', wenn sich Kugel und Oberfläche berühren.
|text=Wir stellen die Bewegungsgleichungen des Systems als System con Differentialgleichungen erster Ordnung auf. Die Nichtlinearität kommt aus den großen Winkeln ''φ(t)'' und dem Kontakt mit der Wand.
|text=Text
Mit unterschiedlichen Steifigkeiten für den Kontakt testen wir die Möglichkeiten der numerischen Integration aus.
Zum Dimensionslos-Machen der Bewegungsgleichungen brauchen wir später eine Bezugszeit ''t<sub>B</sub>'', die wir mit Hilfe der Eigenfrequenz der zugeordneten linearen Systems so wählen:
::<math>t_B = 1/\omega_0</math>
::(Achtung: das macht ''2π''-periodische Lösungen)
Die Eigenkreisfrequenz bei Schwingungen um ''φ =-'' ''π/2'' herum ist
Außerdem wählen wir eine dimensionslose Federsteifigkeit ''κ'', so dass
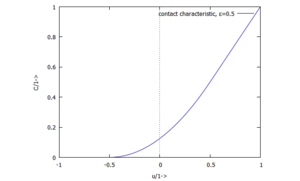
::<math>\displaystyle k = \kappa\cdot \frac{m\,g}{\ell_2}</math>[[Datei:Kv52-02.png|mini|Kennlinie]]Für den nichtlinearen Kontakt wählen wir eine Kennlinie wie in [[Gelöste Aufgaben/Kw23|Kw23]] zu
::<math>C(\tilde{u},\varepsilon) = \left\{\begin{array}{ll}0&\text{ wenn } \tilde{u}<-\varepsilon\\\frac{1}{2}(\tilde{u}+\varepsilon)^2& \text{ wenn } -\varepsilon<\tilde{u}<\varepsilon \text{ und }\\\tilde{u}&\text{ sonst }\end{array}\right.</math>
und einer Lösungsroutine nach dem [[Anfangswertprobleme/Methoden zur Lösung von Anfangswertproblemen/Runge-Kutta-Verfahren 4.ter Ordnung|Runge-Kutta-Verfahren 4.ter Ordnung]] liefert das numerische Ergebnis.
Im Referenzfall erhalten wir - wie erhofft - eine periodische Lösung: die Phasenkurve ist geschlossen. Schon für eine um den Faktur 10 größere Steifigkeit des Anschlags jedoch weicht die Lösung sichtbar von einer periodischen ab. Das klassische Problem von numerischen Integrationsroutinen wird hier sichtbar.
Ein starrer Stab AB (Massenmoment JA, Länge ℓ1) wird aus dem Winkel φ0 im Erdschwerefeld losgelassen und stößt in C auf einen Anschlag. Der Stoß zwischen Stab und Oberfläche sei ideal-elastisch.
Gesucht ist die nichtlineare Bewegungsgleichung und die numerische Lösung als Anfangswertproblem.
Dabei denken wir uns den Anschlag als elastische Feder, die nur für φ<-π/2 Kontakt zum Stab hat. Die Federkraft ist also Null, solange der Stab die Oberfläche in C nicht berührt und sie ist proportional zur Federkompression w, wenn sich Kugel und Oberfläche berühren.
Lösung mit Maxima
Header
Wir stellen die Bewegungsgleichungen des Systems als System con Differentialgleichungen erster Ordnung auf. Die Nichtlinearität kommt aus den großen Winkeln φ(t) und dem Kontakt mit der Wand.
Mit unterschiedlichen Steifigkeiten für den Kontakt testen wir die Möglichkeiten der numerischen Integration aus.
Zum Dimensionslos-Machen der Bewegungsgleichungen brauchen wir später eine Bezugszeit tB, die wir mit Hilfe der Eigenfrequenz der zugeordneten linearen Systems so wählen:
(Achtung: das macht 2π-periodische Lösungen)
Die Eigenkreisfrequenz bei Schwingungen um φ =-π/2 herum ist
Außerdem wählen wir eine dimensionslose Federsteifigkeit κ, so dass
KennlinieFür den nichtlinearen Kontakt wählen wir eine Kennlinie wie in Kw23 zu
Und so wie rechts im Bild sieht sie dann aus:
/*declarations*/assume(g>0,l[1]>0,l[2]>0,m>0);/*parameter*/params:[k=kappa*m*g/l[2],/*springstiffness*/l[2]=3/4*l[1],t[B]=1/omega[0],/*referencetime*/omega[0]=sqrt((m*g*l[1]/2)/J[A]),J[A]=m*l[1]^2/3,kappa=1000]; /*dim'less spring stiffness*//****definenonlinearspringcharacteristic***/C(u,epsilon):=ifu<-epsilonthen0elseifu<epsilonthen1/2*(u+epsilon)^2elseu; plot2d(K(u,0.5),[u,-1,1],[ylabel,"K/1->"],[xlabel,"u/1->"],[legend,"contact characteristic, ε=0.5"]);
Equilibrium Conditions
Die Gleichgewichtsbeziehungen erhalten wir aus einem Momentengleichgewicht um den Punkt A.
Das Freikörperbild
liefert die Bewegungsgleichung
Die Kontaktkraft konstruieren wir mit Hilfe der nichtlinearen Kennlinie C und
Wir tragen hier die Ergebnisse zweier Simulationsrechnungen auf:
... in dieser Spalte den Referenzfall für
... und hier für
zunächst im Zeitbereich
und dann im Phasenraum:
Im Referenzfall erhalten wir - wie erhofft - eine periodische Lösung: die Phasenkurve ist geschlossen. Schon für eine um den Faktur 10 größere Steifigkeit des Anschlags jedoch weicht die Lösung sichtbar von einer periodischen ab. Das klassische Problem von numerischen Integrationsroutinen wird hier sichtbar.
Cookies helfen uns bei der Bereitstellung von numpedia. Durch die Nutzung von numpedia erklärst du dich damit einverstanden, dass wir Cookies speichern.